 Close
Close

Browse the list of poster presentations and prototype/demo showcases at UCL Robotics '23 below.
Poster presentations
Reference: A01
Presenter: Alexander Thomas
BCI-TVR: Brain-Computer Interface Training with Virtual Reality
- Abstract
Brain computer interfaces (BCI) offer users an alternative modality to interact with the world, just by thinking.
BCIs are comprised of two main components: the acquisition equipment, such as electroencephalography (EEG) or functional near infrared spectroscopy (fNIRS); and a machine learning system, which is used to translate the information being recorded from the brain into instructions for the assistive robotic device.
Typically, BCIs for assistive technology and their users are trained in very calm and controlled environments. This has the effect of producing relatively clean data. When these systems are deployed, their accuracy in real world environments tend to be lower compared to the results recorded in the training environment.
In this project, we use 3D simulated environments in virtual reality to train BCI users to control a smart wheelchair, as well as collect ‘noisier’ data to train the machine learning classifier. We can change parameters in the environment, such as noise, lighting, and objects near the user in order to simulate different real-world environments. We are also investigating the optimal method to update (retrain) the classifier throughout this mutual human-machine learning loop.
We hypothesise that this method will increase the rate of successful classification in real world environments.
Reference: A02
Presenter: Aya Kayal
Towards more efficient exploration in Reinforcement Learning
- Abstract
Reinforcement learning (RL) is a branch of machine learning algorithms which is being more and more applied to robotics navigation tasks because it can enable the robot to learn from online interaction with the environment by trial and error through getting feedback from its own actions. The major challenge facing the application of RL in robotics is the exploration problem, especially when the external feedback received is sparse. In this case, the robot fails to explore its surrounding and to solve the task. Therefore, more intelligent exploration strategies in sparse reward environment are needed. This work studies different types of intrinsic rewards (exploration bonuses) pushing the agent to explore more efficiently and imposing a level of diversity on the exploration pattern of the agent. We provide a deeper understanding of how diversity can promote exploration and we classify the different bonus-based exploration strategies between 2 categories: The first category searches in the state space trying to cover as much as possible from the state space and the second category searches in the behavior space trying to learn diverse behavior. The behavior represents either the policy or the skill (goal-conditioned policy) or the trajectory (sequence of states and actions). We implemented trajectory-based exploration bonus on a toy example environment where the agent needs to pick up a key and go back to its initial position. The results show that trajectory-count based intrinsic reward helps in learning faster a better exploration compared to state-count based intrinsic reward. This is interesting because even in a fully-observable environment, we can still favor exploration with a better strategy by looking at the past sequence visited by the agent instead of individual states.
Reference: A03
Presenter: Ben Sargeant
Use of a highly deformable snake arm robot for large volume, high resolution measurement
- Abstract
A common challenge in metrology is in maintaining resolution and accuracy of measurements made over large volumes. The approach developed here attempts to solve this by combining a series of photogrammetric sensor platforms, mounted to a continuously deformable robotic arm, with a 6DoF tracking system capable of locating each of the measurements made within the global space. This allows for alignment of the data captured without the need for additional registration processes, which can introduce compounding errors. The photogrammetric approach allows for the measurement of a very large number of points simultaneously, both allowing for high resolution reconstruction of the measured surface and for multiple sensor platforms to be tracked concurrently. Combined with the use of the snake robot, this offers an advantage over similar handheld systems as it allows multiple sensor packages to be deployed simultaneously whilst conforming to the measurement surface. This allows for faster data capture while still achieving optimal sensor placement.
Reference: A04
Presenter: Davide Grande
Towards controlling Autonomous Underwater Vehicles with faults
- Abstract
Control system architectures are typically designed considering the plant operating at nominal conditions. When faults affect the constituting components, performance and even closed-loop stability guarantees are heavily affected.
Fault-Tolerant Control systems techniques tackle the issue of broken sensors and actuators. Possible approaches encompass the design of robust control functions resilient to a pre-defined set of of faults, or the pre-computation of a multitude of control laws and a switching logic. The design of these architectures requires expert knowledge and significant human endeavour.
To tackle these issues, the Augmented Neural Network Control method architecture is proposed, capable of automatically designing control laws for systems affected by faults. The framework trains two neural networks, one representing the control law, while the second resembles a Lyapunov function, notoriously difficult to obtain by analytical means and for which no systematic design approach is known to date.
The approach has shown remarkably improved performance with respect to other similar works, with promising results in challenging benchmark scenarios. Future works focus on the verification of the technology potential for underwater autonomous vehicles affected by undesirable operating conditions, such as when shark attacks or marine traffic collisions occur.
Reference: A05
Presenter: Jonathan Hawkins
Autonomous Monitoring of Spatio-temporal Changes in Ice Shelf Basal Melt with HF Phase-Sensitive Radar
- Abstract
Ice shelves form when grounded ice flows into a body of water and becomes afloat. If an ice shelf becomes unstable, it can weaken and cause the glacier it holds back to accelerate, increasing the rate at which inland ice can contribute to global sea level rise. The stability of ice shelves can be affected by surface processes such as the pooling of meltwater, and through changes in oceanographic conditions causing basal melt and grounding line retreat. Ice-penetrating radar is one tool that allows glaciologists and oceanographers to study the ice-ocean interface and measure melt rates at the base of an ice shelf.
Satellite radar altimeters can measure the surface elevation of wide areas of an ice shelf, which can be used to estimate basal melt rates, however repeat measurements along the same ground-track typically only occur on annual timescales. Combed with wide crosstrack resolutions, they are limited in their ability to resolve localised (sub-kilometre) variability in basal melting. In contrast, static ground-based phase-sensitive radars such as the ApRES, developed jointly by University College London and the British Antarctic Survey, are capable of resolving basal melt rates down to diurnal time scales but are currently restricted to point measurements.
Autonomous robotic platforms with integrated radar instruments are currently being investigated as a solution to address this trade-off in spatial and temporal measurement resolution and also to mitigate logistical constraints associated with conducting these measurements manually. A new phase-sensitive radar in the HF radio-frequency band (10m wavelength) has been developed to operate with the SubZero autonomous rover (University of Tübingen). The rover is designed to operate in a polar environment to autonomously reposition radars or other geophysical instrumentation along the surface of an ice shelf and collect repeatable, uniformly spaced measurements. The increased wavelength of the new HF ApRES radar, relative to the original design, allows for synthetic aperture processing techniques to be used more effectively and collect imagery of the iceocean interface with improved cross-range resolution. Longer wavelength radar platforms relax the constraints on the positional accuracy required of the autonomous rover’s navigation and mobility subsystems and allow for larger areas to be surveyed in the same time as shorter wavelength radars, at the cost of reduced vertical resolution in processed images.
Field trials with the HF ApRES radar and SubZero rover were conducted on Ekström Ice Shelf, Antarctica in January 2022 and an 850m long profile was surveyed above an area of complex basal topography at the ice-ocean interface. The system was able to successfully image the basal structure of the ice shelf with the autonomous rover operating in both stop-and-go and constant velocity modalities. These trials validated both the novel radar hardware and the feasibility of a ground-based, autonomous, rover-operated synthetic aperture radar for monitoring the basal interface of an ice shelf. Limitations of the combined radar-rover system were identified and include strong direct-wave coupling between the radar antennas, and limited rover mobility during autonomous stop-and-go operation in areas with an uneven surface or soft snow. Repeat measurements are planned to take place in early 2023 to investigate if and how the structure of the ice-ocean interface has evolved.
Reference: A06
Presenter: Maria Stamatopoulou
Learning from an Expert: Velocity-Dependant Gait Transitions for Quadrupedal Robots
- Abstract
Legged robots have gain popularity due to their potential to be used in several applications, such as inspection in industry, household services, and disaster search and rescue. The robotics community has largely focused on tackling the locomotion problem to achieve robust and stable walking behavior. State-of-the-art works present very effective methods to date, however, most fail to achieve adaptive behavior in a bioinspired manner. This presentation outlines novel method of performing velocity adaptive quadrupedal locomotion. The locomotion problem is tackled from a low-level control perspective, following the nature-like behavior of a quadrupeds to adjust their gait according to their velocity. Both model-based and model-free approaches are exploited in a hybrid framework to exploit their benefits. In particular, a direct motor torque policy is learned by the agent to perform robot Center of Mas (CoM) velocity-driven gait transitions. Robot velocity-optimized gaits are generated from an MPC to ensure stability and are then passed to a Proximal Policy Optimization Reinforcement Learning algorithm to achieve robot velocity blending and adaptation to unknown environments. Having a blind, but robust, locomotion controller is an essential part of the robot navigation problem.
Reference: A07
Presenter: Song Ma
An End-to-End Task Allocation Framework for Autonomous Mobile Systems
- Abstract
This work aims to unravel the problem of task allocation and planning for multi-agent systems with a particular interest in promoting adaptability. We proposed a novel end-to-end task allocation framework employing reinforcement learning methods to replace the handcrafted heuristics used in previous works. The proposed framework achieves high adaptability and also explores more competitive results. Learning experiences from the feedback help to reach the advantages. The systematic objectives are adjustable and responsive to the reward design intuitively. The framework is validated in a set of tests with various parameter settings, where adaptability and performance are demonstrated.
Reference: A08
Presenter: Stuart Shanks, Valerio Modugno
Model-Predictive Control for Quadrupedal Robot Locomotion
- Abstract
Quadruped robots have proven to be an excellent option for traversing complex or unstruc- tured environments and terrains [1, 2]. Using articulated limbs, quadruped robots are able to maneuver across a greater variety of terrains than wheeled robots. Developing methods for quadrupedal locomotion is vital for their use in the real world. Robust locomotion control ensures that the quadruped robot will consistently be balanced and stable when walking.
This poster will present a method for quadrupedal robot locomotion using Model-Predictive Control (MPC) to optimise Ground Reaction Forces (GRFs) for feet in contact with the ground. The MPC problem is formulated using CasADi [3], an open-source library designed to facilitate the solving of optimisation problems. CasADi interfaces directly with optimisation solvers, meaning that a user is only responsible for writing a framework of the optimisation problem. This framework can be written in Python or MATLAB, then exported to C/C++. Here, we wrote the MPC problem in Python, and exported to C++ for use on the quadrupeds. We used an open-source MPC controller as the baseline, published by Di Carlo et al. [4]. The cost function of this MPC problem is convex and is solved using a quadratic programming solver (in this case, qpOASES [5]). The advantage of writing the problem using CasADi is that our framework is: (1) flexible (can easily be modified to incorporate a more complex dynamics model); and (2) readable (CasADi frameworks are intuitive to understand with sufficient knowledge of the optimisation problem). Our controller enables the robot to walk with stable locomotion in a variety of gaits. We will present the results of our controller against the baseline controller in simulation and on the real robot by comparing the GRFs of contact feet when employing a variety of different gaits.
Bibliography
[1] D. Kim, D. Carballo, J. Di Carlo, B. Katz, G. Bledt, B. Lim, and S. Kim, “Vision Aided Dynamic Exploration of Unstructured Terrain with a Small-Scale Quadruped Robot,” in IEEE International Conference on Robotics and Automation (ICRA), pp. 2464–2470, 2020
[2] J. Hwangbo, J. Lee, A. Dosovitskiy, D. Bellicoso, V. Tsounis, V. Koltun, and M. Hutter, “Learning Agile and Dynamic Motor Skills for Legged Robots,” CoRR, vol. abs/1901.08652, 2019.
[3] J. Andersson, J. Gillis, G. Horn, J. Rawlings, and M. Diehl, “CasADi: a Software Framework for Nonlinear Optimization and Optimal Control,” Mathematical Programming Computation, vol. 11, 07 2018.
[4] J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the mit cheetah 3 through convex model-predictive control,” in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1–9, 2018.
[5] H. Ferreau, C. Kirches, A. Potschka, H. Bock, and M. Diehl, “qpOASES: A parametric active- set algorithm for quadratic programming,” Mathematical Programming Computation, vol. 6, no. 4, pp. 327–363, 2014.
Reference: A09
Presenter: Yanchao Wang
Designing a Fault Tolerance Control Strategy for a Fire-rescue UAV with Tilting Rotors and Deformable Arms
- Abstract
The current study represents the initial phase of developing a control strategy for a quadrotor to transfer back into a working state as a tri-rotor from a fault tolerance state when any motor malfunctions. We designed and 3D-printed a quadrotor frame with a tiltable motor unit on each of its arms to bring more DoF to a fault system. The tiltable motor unit is driven by a BLDC motor with a high-ratio gearbox while performing a fast (3.5 rad/s) response. Modeling and simulations of the tiltable quadrotor have already been done, while its experimental tests and optimizations are still in progress. For better controller performance, a closed loop system identification has been processed with different frequencies of sine wave input (chirp wave frequency sweep). Rather than choosing the controller parameters according to the experiments, the parameters are selected by MATLAB according to the generated Bode map. In the meantime, optimization to auto-adjust PID parameters is implemented on the prototype to minimize the error between simulation and experimental tests. As another optimization, the accelerometer is also brought to compensate the position feedback rather than only used in attitude control. The entire procedure runs on a multi-rotor test bench, which fixes the drone in a gyroscope frame for a safe testing environment. As well, a Gazebo environment has also been built for a HIL test before the future test for fault tolerance control.
Reference: A10
Presenter: Ahmad Drak
Adaptive Exploration and Active Mapping for Forest Environmental Monitoring
- Abstract
There is a need for persistent and accurate environmental monitoring after a set of climate change induced disastrous natural phenomena such as large forest fires and unprecedented bark beetle infestation of trees. These environmental monitoring applications require large amounts of accurate spatial and temporal data. Remote sensing satellites are typically utilized because of their ability to survey large and inaccessible areas. However remote sensing satellites on their own are often not sufficient due to their limited spatial resolution of several meters per pixel. Unmanned Aerial Vehicles (UAVs) are often tasked with mapping an environment and to collect data more accurately and at a much higher resolution. Data collection missions using UAVs can be planned flexibly to avoid poor weather conditions, thus providing high resolution spatial and temporal data on-demand.
In contrast to passive sensing where data is continuously collected regardless of its redundancy, informed sensing applies selective data collection guided by an information-gain utility, typically utilized to actively explore an environment. In this work we investigate adaptive exploration and active mapping of an apriori unknown environment using a UAV robotic platform, guided by an information-gain-based controller. The generated control actions and motion commands will guide the robot to a location in which the expected information-gain is to be maximized, increasing the area coverage for exploration. The mapped forest terrain will be used to determine potential seeding locations for planting trees as the failure of seeds to germinate is an issue of the current reforestation efforts. Determining potential seeding locations is a challenge of interest that can be perceived as a classification problem that attempts to answer the question “is this a good place to plant a seed?”
Reference: A11
Presenter: Dennis Hadjivelichkov
One-Shot Transfer of Affordance Regions? AffCorrs!
- Abstract
We tackle one-shot visual search of object parts. Given a single reference image of an object with annotated affordance regions, we segment semantically corresponding parts within a target scene. We propose AffCorrs, an unsupervised model that combines the properties of pre-trained DINO-ViT's image descriptors and cyclic correspondences. We use AffCorrs to find corresponding affordances both for intra- and inter-class one-shot part segmentation. This task is more difficult than supervised alternatives, but enables future work such as learning affordances via imitation and assisted teleoperation.
Reference: A12
Presenter: Hao Sun
A Convex and Robust Distributed Model Predictive Control for Heterogeneous Vehicle Platoons
- Abstract
Connected and autonomous vehicle (CAV) technology is believed to provide numerous benefits for road traffic, including increased road safety, reduced traffic congestion and improved energy efficiency. This paper addresses the control problem of a heterogeneous CAV platoon with consideration of multi-dimensional uncertainties that include modeling uncertainties and local measurement disturbances. A tube-based model predictive control algorithm (MPC) is designed in a distributed fashion subject to a unidirectional predecessor-following (PF) communication topology. As such, the boundedness of the consensus error in terms of the speed and headway among all CAVs is guaranteed. To improve the computational efficiency, the resulting optimal control problem (OCP) is convexified resorting to a spatial domain modeling approach with appropriate coordination changes and the relaxation of nonconvex constraints. The equivalence of the relaxed and original OCPs is rigorously proved to ensure the validity of the solution. Moreover, asymptotic stability and recursive feasibility of the MPC are studied. Finally, simulation results and comparisons against a benchmark method using nominal MPC are carried out to verify the performance and computational efficiency of the proposed method.
Reference: A13
Presenter: Jonathan Embley-Riches, Jianwei Liu
Quadruped motion planning based on exteroceptive sensing
- Abstract
Automation in Robotics and AI can benefit many industries where efficient and safe navigation is required. In these challenging, hazardous, or even extreme environments, quadrupeds have the benefit of using sparse footholds to negotiate 3D terrain in a greater variety of unstructured surfaces compared to traditional robots. To materialize this advantage we combine 3D scene segmentation using exteroceptive sensing with grid mapping and an NMPC controller to intelligently navigate an environment.
Reference: B01
Presenter: Azadeh Shariati
The Bubble Worlds - a Social Interactive Structure Reflecting How Did Refugees Experience the Covid-19 Lockdown?
- Abstract
The Bubble World is a social interactive large-scale structure with soft robotics components reflectingon psychological experiences of Covid lockdowns, a refugee community revealed amazing stories of resilience. Despite their double isolation, from their new community by lockdown and alienated their old community by geography, it became a chance to form a protective cocoon around themselves embracing it as a moment in which to be reborn. Bubble Worlds set off with the vision to explore, through a process of intense collaboration/co-creation, how we can use our respective skills as roboticists/artists to meet challenges faced by disadvantaged people in this pandemic era. We as researchers (in the field of robotics) co-created this robotic art structure with artists (Duncan Paterson, a community called Rosetta Arts) and a refugee community (Code Your Future) forming a truly multidisciplinary team. The most visible part of the sculpture is a cocoon-like structure that embodies the ‘bubble worlds’ created for self-preservation as a protective shield from the negative 24-hours Covid news cycle. Soft robotic, inflatable structures within the elastic fabric of the cocoon simulate a calming and natural ‘breathing’ behaviour. Within the cocoon, projection-mapped generative visuals and audios are displayed, based on forms of pattern/movement found in nature.
Reference: B02
Presenter: Duncan Raitt
Pneumatic Membrane Actuation for Tissue Stiffness Sensing and Palpation
- Abstract
Stiffness sensing is beneficial in many teleoperated and autonomously controlled tasks. Stiffness can convey information about an object’s material, its condition and how it should be handled. Currently, sensors that can measure stiffness and detect changes in stiffness when moved across objects are hard-tipped. This may cause damage to soft or fragile objects. We have produced a soft-tipped sensor that can quantify stiffness and locate stiffness boundaries. By pneumatically actuating its membrane on samples, the sensor can measure stiffness with a Root Mean Square Error (RMSE) of 7.2%. When mounted on a linear rail and passed over a boundary between a 13.4 kPa elastomer and a 2 mm embedded 29.3 kPa elastomer, the sensor can produce an average signal-to-noise ratio (SNR) of 39.51. Additionally, participants can locate a similar boundary in a teleoperated scenario with visual feedback from the sensor with an accuracy of 96.5%.
Download poster here.
Reference: B03
Presenter: Ge Shi
Fluidic haptic feedback system
- Abstract
Abundant advancements have been achieved to generate the sensation for amputees with invasive and non-invasive haptic feedback systems such as mechano-, vibro-, electro-tactile and hybrid systems. However, purely mechanical-driven feedback approaches have been minor explored. We created a haptic feedback system that does not require an external power source (such as batteries) or other electronic components. The system is low-cost, lightweight, adaptable and robust against external surroundings. Hence, it will be sustainable in many aspects. By designing the fingertip sensor into multi-cavities and adopting soft robotic technologies, 3-axis force can be sensed and feedback to amputees. When forces are applied to the fingertip sensor in a direction, hydrostatic pressure inside the cavities increases differently. It pressurises the feedback actuator resulting in mechano-tactile sensation with amplitude and direction of the force.
Reference: B04
Presenter: Igor Gaponov
Twisted String Actuation Systems in Robotics
- Abstract
Twisted string actuators (TSAs) are cable-driven actuators in which cables contract as a result of their twisting. During the past two decades, TSAs have found their use in many robotic systems including compliant exoskeletons and wearable robots, haptic interfaces, mobile robots, robotic muscles and hands, active joints and motion generation mechanisms and many others. TSAs are becoming more popular in big part because of their advantages over conventional actuators, namely flexibility, mechanical simplicity and high power-to-weight ratio, which also enables designing efficient high-precision devices with compact actuators. In this presentation, I would like to review the fundamentals of cable twisting, provide an overview of control and trajectory planning in TSA and discuss several exciting and potential applications of TSA in robotics.
Reference: B05
Presenter: Jialei Shi
Modelling and Control for Chamber-reinforced Soft Robots with Dimension Scalability
- Abstract
Elastomer-based soft continuum robots driven by fluids have prosperously emerged and developed for, e.g, dexterous manipulation, biological locomotion, and safe robot-environment interaction. A safer interaction is especially advantageous in medical procedures, for example, minimally invasive surgeries, where unexpected hard contact between the medical instruments and human organs can be mitigated. To be functionally applicable for this, the soft instruments should have a scalable dimension, with predictable, reliable, and repeatable behaviors. Motivated by this, we created soft manipulators with a miniaturization capability, of which the diameter can be smaller than 10mm, with omni-directional bending and elongation capabilities. Each actuation chamber is fiber-reinforced to improve the kinematic consistency. In addition, the central channel is preserved for attaching appendages. The design paradigm for this robot is flexible to be tailored based on the assessments of the specific application. To investigate the stiffness controllability of the soft manipulator, we also proposed a modelling method which can be used to describe the distributed and configuration-based compliance. The forward and inverse kinematic can also be achieved by optimization. The overall results show that the robot is promising for the further application.
Reference: B06
Presenter: Kamyar Motaghedolhagh
A Body-Powered Soft-Actuated Partial-Hand Prosthetic Device with Integrated Haptic Feedback
- Abstract
A prosthetic device can enhance the quality of life and health of patients with limb loss. The benefits of regular prosthesis use also extend to those with partial amputations of their hands (digits, thumbs, and transmetacarpal). Various types of partial-hand prostheses with different abilities and mechanisms have been designed and manufactured, which can help improve the functionality of amputees according to their kind of disability. Soft robotics rising recently has attractive advantages in terms of safe interaction with partial-hand amputees.
This research proposes a novel soft wearable body-powered finger prosthesis. The main feature of this prosthetic device is bending the distal interphalangeal (DIP) joint by transferring the force/pressure generated in the proximal interphalangeal (PIP) joint using a wearable soft-hydraulic mechanism. Also, the proposed finger prosthesis will be able to provide a sense of touch to amputees with their surroundings by using a soft hydraulic closed-loop subsystem. The proposed finger prosthesis can be used for people with disabilities who have lost the distal phalanges and some parts of the middle phalanges of the index finger. However, this prosthetic device can be used by amputees on any other finger except the thumb.
Reference: B07
Presenter: Lei Wu
Visible Light driven Polyurethane Elastomer Bionic Photo Fingers
- Abstract
Light-driven soft robotic actuators based on photo-responsive materials can be utilised to mimic the biological functions, such as swimming, walking, crawling without involving rigid and chunky electromechanical actuations. However, a robust photo-responsive material with desired mechanical and biological performance and facile synthetic process for constructing potential light-driven soft robotics, especially for assistive technology and biomedical applications, is yet to be developed. Herein, we report a new visible light-responsive elastomer synthesized by introducing photo-responsive moieties (i.e. azobenzene derivatives) into the main chain of poly(ε-carporlactone) based polyurethane urea (PAzo). PAzo elastomer shows controllable light-driven stiffness softening while maintaining excellent hyperelasticity (stretchability of 575.2% and strength of 44.0 MPa) and good biocompatibility due to its unique nanostructure and nanophase transition. A visible light-driven bilayer actuator consisting of PAzo and polyimide film has been developed, demonstrating two distinct bending modes under illumination with varying light intensities. The corresponding actuation mechanism in correlation to photothermal and photochemical coupling effects has been explored through experimental analyses and theoretical calculations. An exemplar application of visible-light controlled soft robotic ‘fingers’ playing music through touching a piano on smartphone demonstrates a robust elastomer and scalable process for design and manufacture of light-driven wearable/implantable robots or assistive devices for medical rehabilitation and surgical reconstruction.
Reference: B08
Presenter: Luke Beddow
Learning to Grasp Objects by Touch
- Abstract
Reinforcement learning is frequently deployed with robotic grasping, aiming for a control policy to actuate gripper fingers and achieve stable grasps on a variety of objects. There is large potential for automation of logistics tasks such as warehouse packing of fruits and vegetable items using this method, which remains a challenge with existing grippers and controllers.
This work presents a specialised gripper for fruit and vegetable grasping which uses a caging inspired approach to surround objects, investigating the use of a deep Q-network reinforcement learning control policy which uses only touch sensing data as input, rather than a camera. Bendable fingers are instrumented with strain gauges for a robust and lightweight solution. Training is accomplished in simulation and made possible by a proposed approximate model for finger bending as traditional deformation simulation is slow, limited, and difficult to integrate with existing simulators.
Results will be presented in simulation and real life to demonstrate the approach, with a comparison on unseen objects as well as ablation study to investigate the contribution of each of the sensors. Experiments will compare a variety of finger stiffnesses to both assess the best performance as well as validate the finger bending model.
Reference: B09
Presenter: Wenlong Gaozhang
A stiffness-controllable joint using antagonistic actuation principles
- Abstract
Developing inherently safe, collaborative robots is necessary to improve human-robot interaction. One of the main challenges in the development of soft actuators, links, and joints for collaborative robots is the limited amount of force and stiffness that can be achieved. We propose a joint that can change its stiffness through an antagonistic actuation principle. Compared with existing joints, our joint is more compact, and it is composed of a higher percentage of soft material to enable safer human-robot interaction. We describe the design and fabrication of the joint prototype and illustrate the feasibility of our new concept. Kinematic and stiffness models are proposed to analyse the bending and stiffness behaviour of the prototype, which are then experimentally validated. The experiments demonstrate that the proposed joint can achieve a bending angle of 48.8 degrees in both directions, while the output force can reach 20N at 1.5 bar pressure. The stiffness experiments indicate the proposed joint can change its stiffness significantly (i.e. maximum variable stiffness range is from 35.42 N.mm/degree to 102.59 N.mm/degree) by the antagonistic actuation principle. Furthermore, we demonstrate a variable force output application based on our joint, showing it can achieve output force on demand easily.
Reference: B10
Presenter: Erin Nolan
Internal Continuous, Dense Granular Flows With Soft Robotics
- Abstract
A novel design of soft robotic pipeline is presented that uses inflating and deflating bubbles along the pipe walls to keep the granules in an unjammed state at higher densities and thus smoothing the otherwise disrupted periodic flows exhibited by granules as they jam. Four main variables were identified as underpinning, globally and locally, whether the system is jammed or unjammed and capable of flows. Existing methods of transporting athermal granules are mostly rigid-bodied high-risk environments. These issues could be addressed by using soft robotics. The only previous soft robotic granular transport designs were peristalsis which provides only jammed batch outputs.
Reference: C01
Presenter: Carmen Salvadores Fernandez
Flexible Force Sensors to Improve Safety and Training in Operative Birth
- Abstract
Both vaginal examination in labour and assessment of anal sphincter injury postpartum are highly subjective, and can lead to devastating consequences when wrongly diagnosed. Our objective was to develop a wearable device for digital vaginal examination that would facilitate diagnosis of fetal position and anal sphincter injury. The device is a routine surgical glove with specialised force/pressure sensors embedded onto its fingertips. It is covered with another surgical glove for sterility.
The sensors were calibrated using a setup that achieves a 10 μm step size and a 0.0088 N sensitivity. The calibrated sensors produced distinct peaks when passing through sutures on models of the neonatal head, and through a sphincter defect, both with 100% accuracy, achieving a 20 Newton force range and 0.1 Newton sensitivity. A software interface was developed to demonstrate when the glove came into contact with the suture/defect.
We have demonstrated that a sensorised surgical glove can identify skull sutures on models of the neonatal head, and also detect anal sphincter injury in a relevant preclinical model – the pig. The technology has the potential to improve the safety of operative vaginal birth and increase detection rates of obstetric anal sphincter injury.
Reference: C02
Presenter: Junke Yao
Valvuloplasty Balloon Catheter Assisted Compliant Aortic Annulus Sizing with Variable Elliptical Ratio
- Abstract
One of the major heart valve illnesses is aortic stenosis (AS). Transcatheter aortic valve implantation (TAVI) is a minimally invasive interventional treatment for AS that substitutes a prosthetic valve for the damaged natural valve and heavily utilizes balloon catheters for device placement and leaflet dilatation. Current clinical guidelines state that the selection of the implanted device is based on pre-operative size using various imaging-based techniques. However, this assessment has intrinsic flaws that result in the prosthesis being too undersized, which has serious intraoperative problems such as aortic regurgitation or disruption of the cardiac electrical signal. It is shown how to use the balloon pressure and volume data to calculate the aortic annular dimension intra-operatively while taking compliance and elliptical geometries into account. An automated balloon inflation device using a balloon catheter for valvuloplasty was used to produce the intra-balloon pressure-volume curves. Two models were incorporated into a sizing algorithm to estimate the annulus's dimensions. According to experimental findings, the idealized aortic annulus can be identified with high precision and repeatability using the pressure-volume data processed by the sizing algorithm. This work demonstrates significant advancements in compliant aortic annulus balloon sizing and complex geometry TAVI device selection.
Reference: C03
Presenter: Raffaele Buono, Minna Nygren, Liang He, Perla Maiolino, Nadia Berthouze, University College London, University of Oxford
How understanding the role of instrumental-affective touch in occupational therapy practice may support the development of collaborative robots in healthcare
- Abstract
Research into the role of touch in client-clinician interaction in healthcare settings has demonstrated that the use of touch has the capacity to function on instrumental and affective planes simultaneously. An instrumental touch, used as part of a healthcare assessment, may also convey, or be experienced as having affective qualities, such as reassurance. Given this multifaceted nature of touch, and the pressing need to develop collaborative robots in an increasingly complex healthcare landscape, it is important to understand the detailed nuances of touch practices.
Our study is focused on understanding occupational therapists’ (OT) use of touch in healthcare. Our work aims to gain insights into the overlapping instrumental-affective qualities of touch to support the development of robots and thus aid OT training. Our qualitative analysis of ten semi-structured interviews and a research workshop with 11 OT participants addressed touch from different perspectives (re-enactment, skin sensations, affective states). Our findings give a rationale for studying touch modulations, demonstrating ways in which touch is adjusted during client interaction, and the reading of a client’s affective-physical state through touch.
Authors: Raffaele Buono, Minna Nygren, Liang He, Perla Maiolino, Nadia Berthouze, University College London, University of Oxford
Grant: From Sensing to Collaboration, EPSRC EP/V000748/1
Reference: C04
Presenter: Yaxi Wang
A New MR-compatible Robotic System for Pulmonary Artery Catheterisation
- Abstract
This project designed an highly compact MR-compatible robotic system for cardiopulmonary artery catheterisation. The prominent point is that the robot can control catheter to achieve simultaneous and continuous translational and rotational movements. And clinically validated for its MR compatibility.
Reference: D01
Presenters: Jingyuan Meng, Guillem Perutxet Olesti, Pradeep Devadass
Applied Robotics in the Built Environment
- Abstract
Robotic technologies are potential solutions to reduce the construction industry's labour risks and intensity, improve production efficiency, and guarantee outcome qualities in the construction industry. Integrating robotics into the built environment can effectively reduce production costs and waste of raw materials, thereby achieving economical and environmentally friendly results. In recent years, architecture institutions are beginning to explore the potential application of robotic technologies in the building industry. Im-plementing robotic technologies in academia enables design flexibility by diminishing manufacturing constraints. Training architecture students working alongside robots pro-vide better communication and a more structured data flow between design and build.
Robotics at Bmade conducts teaching and research on computational design and com-puter-aided manufacturing processes in architecture. Our focus is on applying automa-tion in architecture by investigating formal possibilities and developing material practic-es enabled by robotic manufacturing processes. In our theoretical and practical frame-work, we apply computational models to generate, simulate and evaluate production and assembly logics informed by material development and performance analysis to develop integrative robotic processes to produce performance-oriented architectural systems.
The teaching goal of the robotics department in BMade is to expose students to the in-terrelation of algorithmic form generation, digital fabrication, and material development across the cutting-edge facilities at BMade. We offer to teach in architectural design programs with a focus on incorporating technological developments across the fields of engineering, materials science, computer science, and biological sciences on the direct implementation of material and production logic into the design of robotic processes for performative material and building systems.
Reference: D02
Presenter: Jan Luca Kastle
Multi-modal feedback for take-over request in highly automated vehicles
- Abstract
We are currently experiencing a paradigm shift towards fully autonomous vehicles. Highly Automated Vehicles (HAVs) are characterised by varying degrees of autonomous capabilities. Over the few next years, drivers will be provided with increasingly sophisticated autonomy features. Each level of autonomy requires a different level of the driver’s cognitive/physical intervention. During autonomy level transitions, the vehicle may require an engaged driver to monitor the system and take over control in an intuitive and timely way under conditions when the vehicle’s Advanced Driving Assisted Systems cannot handle itself.
We have studied the effectiveness of combinations of visual, audio and haptic feedback for a safe and timely take-over control in HAVs. The driver seat made of robotic structures has been used for the haptic feedback purpose in this study. The changes in stiffness of the seat can increase attention and alertness, and cues through side bolsters can guide the driver's gaze to the potentially hazardous event. During our experiments, sensing data from driver’s brain (Electroencephalography (EEG) signals) and driver’s gaze point (eye tracking glasses data) have been collected.
Haptic feedback has been shown to be effective in guiding drivers, and well-received in terms of user satisfaction and comfort. Our experimental results also show that drivers react faster when they are alerted through a mode including haptic feedback, and multi-modal feedback including haptic driver seat leads to faster reaction times and fewer crashes. Additionally, when detecting lack of attention from the driver, feedback given via the haptic driver's seat can help to raise their Situational Awareness, which can be measured through brain- and eye-activity measurements.
Reference: D03
Presenter: Alexander Blakesley
Energy and Risk UAV Trajectory Optimisation
- Abstract
The Solent region of the UK sees thousands of medical samples moved between surgeries and hospitals on a daily basis. A fleet of vans are currently tasked with completing these deliveries, and often the routes that they take are not time and energy efficient. Some of these deliveries could be done by drones as they have the advantage of not being constrained by roads and traffic, potentially allowing for faster delivery times. However, this advantage is offset by limited range of batteries, higher travel risk, and lower cargo capacity. Through minimum energy and risk trajectory optimization, drones can potentially prove to be a competitive logistics solution.
A multi-objective route optimisation framework is developed by taking into account a state and control vector, the dynamics of a drone and a series of constraints to ensure the drone behaves realistically. Within the objective function a model of the energy consumption over the trajectory is weighted against a cumulative ground and flight risk value. The weighting given to risk and energy consumption can be adjusted based on the specific use case, with some applications prioritizing the safety of the flight, while others prioritize energy consumption.
The subsequently generated route can then be used to for instance compare how a drone delivery would differ from a van delivery when completing a logistics task and thus enable policy makers and logistics planners to make informed decisions.
Demo/Prototype Showcases
Presenter: Sara Abad Guaman
SoftSensation for robotic surgery
Description
Touch sense plays an important role when humans interact with the environment. For example, touch sense allows differentiating characteristics of objects (e.g., rigidity and textures) or clues such as vibrations to localize arteries, edges of organs, or irregularities. However, when using current haptic technologies (e.g., vibrotactile, visual cues, and force feedback), users still require intensive training to relate the received input stimulus with the corresponding touch sense information. This research studies the touch sense from the biological framework. In our demo, we show a soft bioinspired haptic system. The human finger inspired the actuator design, and the haptic sensor allows a sensing range, similar to the human sensation, to acquire data from hard to soft tissue.
Presenter: Duncan G. Raitt
Pneumatic Membrane Actuation for Tissue Stiffness Sensing and Palpation
Description
Stiffness sensing is beneficial in many teleoperated and autonomously controlled tasks. Stiffness can convey information about an object’s material, its condition and how it should be handled. The Pressure Modulated Optical Tracking (PMOT) Sensor is a soft tipped sensor for stiffness sensing and palpation. In this demo you may use the PMOT sensor to sense the stiffness of samples and palpate tissue to find embedded boundaries.
Presenter: Hoang Le
Virtual Reality and Augmented Reality Surgical Simulations using SPEEDOP Platform
Description
VR/AR technology has the potential to revolutionise the way surgical procedures are trained. VR/AR can provide a safe, effective, and low-cost environment for surgeons to practice and sharpen their skills without worrying about real-life consequences. In our hands-on demo, the users can put on VR headsets to have an immersive view of the operating theatre. One user can drill through the patient's hip bone using a Haptic robot, while the other can observe the whole process via the VR headset. This demo shows that we can potentially use this technology as an effective tool for education when trainee surgeons from all over the world can learn complicated techniques from the top surgeon via the Internet.
Presenter: Jialei Shi
Chamber-reinforced Soft Continuum Robots
Description
The soft continuum robots are made of silicone rubber, with high flexibility and dexterity. They can be designed with different cross-sectional dimensions based on applications and their diameter can be miniaturised to millimetre scale (less than 10 mm). The robots are pneumatically driven and with fully fibre-reinforced chambers. It can achieve longitudinal elongation (70%-100%) and omni-directional bending (> 300 degrees).
Presenter: Intelligent Mobility @ UCL
Driving into the future
Description
In the race towards the first commercially available fully Autonomous Vehicles (AV), the number of AVs on roads will dramatically increase. Humans are challenged to change between autonomy levels causing safety concerns. During the exhibition, we will give a demonstration on how future highly automated vehicles could inform the driver to take back control. Visitors can experience the IM@UCL mobile driving simulator (www.im-ucl.com) receiving different types of feedback, including audio and haptic feedback. For a successful rollout of fully AVs, it is of paramount importance to address safety gaps in AVs until fully automated driving becomes feasible.
Presenter: Bartlett School of Architecture
Project name: Calcareous Arabesque
Researcher: Jingyuan Meng, Dali Alnaeb, Anete Krista Salmane, Pradeep Devadass, Prof. Marcos Cruz, Dr. Brenda Parker
Program: Bio-Integrated Design, Bmade, 2022
The research address the materiality of a post-waste scenario, a case study based on a calcium carbonate by-product from sugar refining was investigated. Here we demonstrate an interconnected workflow for fabrication scale up with a biopolymer based composite material, Cal-x. Robotic 3D printing was employed as a method for construction, enabling customization to accommodate the material properties of Cal-x. The resulting output from this work, Calcareous Arabesque, was presented at the Design Museum London as part of the Waste Age exhibition, demonstrating a porous wall system that does not rely on continuous volumetric massing at an architectural scale.
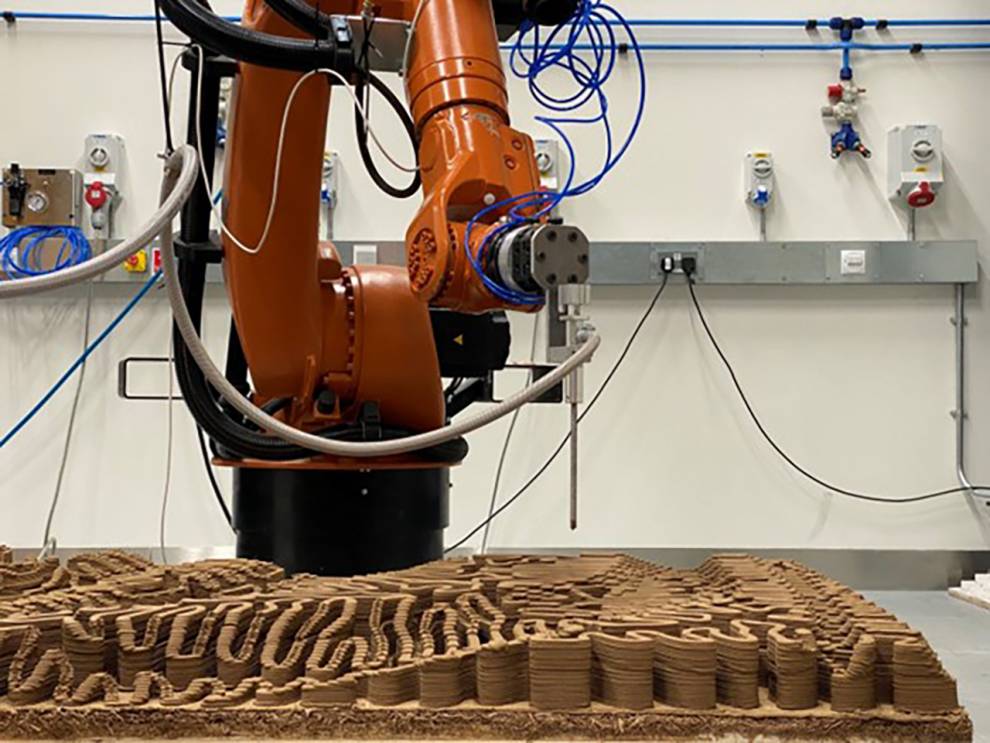
Project Name: COB
Researcher: Ella Hetherington, Guillem Perutxet Olesti, Ben Lee, Pradeep Devadass
Program: Bmade 2022
Variable Aggregate Impact Printing (VAIP) is a novel additive manufacturing methodology for the automated assembly of traditional cob using a six-axis robotic arm and custom tool. This methodology enables the aggregation of discrete particles composed of soft heterogeneous material containing aggregates of multiple sizes.

Project Name: MYCOstratum
Student: Natalia Piorecka
Program: Bio-Integrated Design 2023
Layered Multi-material Bioremediation
The research investigates a creation of a self-sustaining, layered material system that host a potential towards bioremediation of degraded or polluted soils through mycoremediation and later phytoremediation. Through the prism of architecture and biology, the work focused on the fabrication strategies for the multi-materiality of layered living biomaterials. A scaffold for loose particles of soil and cellulose fibres was created using robotic extrusion 3D printing, resulting in a structure able to host substrate for the growth of plants and fungi.

Project name: Sound Pixcel
Student: Bingze Li
Program: Design for Manufacturing 2022
The research developed a modular acoustic brick system inspired by Helmholtz resonator, which absorbs specific frequencies and affects the scattering of medium and high-frequency sounds in space. The manufacturing process utilised KR60 in conjunction with Turntable, With customised end-effectors and manufacturing parameters for robotic wire cutting, carving and wire sawing.

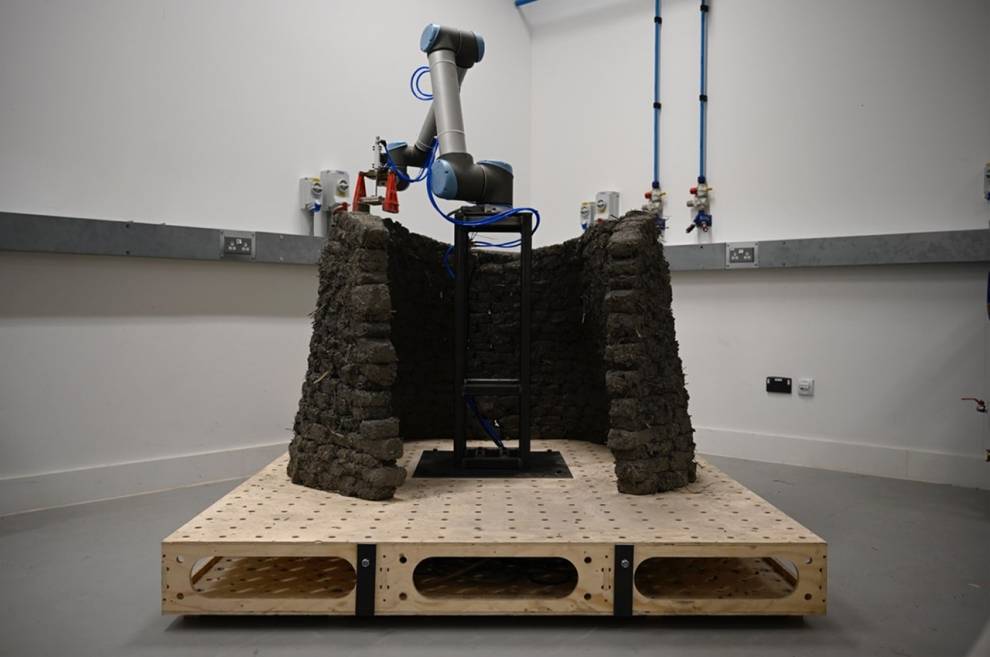
Project Name: TERRA EX MACHINA
Student: Kenneth Wilson Rozas
Program:Bio-Integrated Design 2023
IMPACT PRINTING WITH BIOPOLYMER IMPROVED SOIL MIXES:
The research has been focused around exploring the possibilities of using biologically based polymers in improved soil mixes could bring in the framework of impact printing as a construction method, with the goal of producing self-supporting structures in complex three-dimensional geometries that could produce and host specific bioclimatic conditions.

Project Name: Bio-Scaffold
Student: Shairfunnisa Mynasabgari, Mounika Maddipatla, Ajitesh Murmu
Program: Bio-Integrated Design 2023
IMPACT PRINTING WITH BIOPOLYMER IMPROVED SOIL MIXES:
This project aims to explore a comprehensive design approach intended to enable and enhance the bio-receptivity of ceramic-based structures for moss growth. This bio-receptive building material is created with agro-industrial waste such as sugarcane bagasse as the primary substrate resulting in microporous ceramics. The material compositions are fine-tuned to improve strength and avoid cracking. The potential of the material has been explored with digital additive manufacturing processes such as robotic 3D printing to fabricate complex geometries.