 Close
Close

Mobility Devices

Case study: I always wanted my future to be in robotics
PhD student Chinemelu developed a smart wheelchair equipped with mobile robotic technology to assist the user in particular situations.

Case study: Instrumented Tricycle
Students from Belgium describe how biomedical engineering is used to convert a recumbent tricycle into a device that can be used by people with spinal cord and other major injuries.

Case study: Adaptive shared control systems
Shared control systems combine automation and user control into a hybrid control system. 17-year-old Ciara Gibbs shadowed PhD student Chi Ezeh to learn more.
ADAPT
ADAPT stands for Assistive devices for empowering disabled people through robotic technologies. This project started in 2017. It has 16 partners (eight in England, eight in France) and focuses on four main topics.
- Smart and connected Electrically Powered Wheelchairs (EPW) with driving assistance technologies and ability to report users' health by internet. This system will benefit severely disabled users and enable health professionals to monitor changes in user health.
- EPW Simulator platform using virtual reality to give users an immersive experience of the Smart and Connected EPW and train them to drive. Professionals will assess the suitability of the EPW for patients and environments and gain understanding of the user perspective.
- Training of healthcare professionals in AT/SAR. This novel training provision addresses a gap in current healthcare education. Project platforms will be captured in training protocols for the benefit of users and healthcare providers.
- Formal agreements between research institutions and companies built through 20 events ranging from local to international meetings for promoting and disseminating ADAPT's results, creating synergies, identifying points of convergence for common studies to boost R&D and favour the spread of ADAPT's AT/SAR to the market.
UCL's main contributions to the project concern the "adaptive shared control" algorithms that provide appropriate assistance to users of smart electrically powered wheelchairs. The expected result is a prototype Smart Wheelchair featuring this framework that will help users drive safely and effectively.
See the ADAPT project website for full details.

- In French (en français)
Le projet ADAPT, cofinancé par le Fonds Européen de Développement Régional dans le cadre du programme INTERREG VA France (Manche) Angleterre, a débuté en janvier 2017. Il réunit 16 partenaires, 8 français et 8 anglais, autour de deux enjeux socio-économiques majeurs : le vieillissement de la population et l'augmentation du nombre de personnes fragilisées.
Décliné Assistive Devices for empowering disAbled People through robotic Technologies (Dispositifs d'assistance à l'autonomisation de personnes handicapées grâce à la robotique), le projet s'articule autour de quatre axes de travail:
- La réalisation d'un fauteuil roulant électrique (FRE) intelligent et connecté compensant les handicaps des utilisateurs grâce à des technologies d'assistance à la conduite.
- La réalisation d'un simulateur de conduite en réalité virtuelle pour une expérience immersive du FRE intelligent.
- La mise en place d'un package de formation destiné aux professionnels de santé sur les apports du Numérique pour les Technologies d'assistance.
- La signature de quatre accords de partenariat entre instituts de recherche et entreprises construits grâce à des événements locaux et internationaux pour créer des synergies, promouvoir et diffuser les résultats du projet.
L'équipe UCL travaille autour d'algorithmes "contrôle partagé adaptive", qui donneront assistance à l'utilisateurs des fauteuils roulants électriques, quand ils l'ont besoin. Pour plus d'informations, voir le site-web du projet ADAPT.
YouTube Widget Placeholderhttps://www.youtube.com/watch?v=sXaMLnPXh68
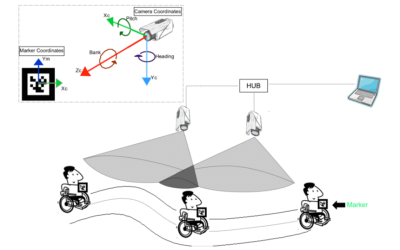
MoRe-T2: Mobility research trajectory tracker
We developed a low-cost tool (MoRe-T2) that uses standard webcams or CCTV cameras to track the trajectories of people, wheelchairs and scooters in an accessibility and mobility research environment.
Custom printed QR-type codes (on ordinary paper) are attached to participants, mobility devices or any objects of interest that allows us to generate rich and precise datasets.
MoRe-T2 is deployed in both PAMELA and the Aspire Create lab, where it continues to be used to evaluate wheelchair interfaces.
We have made the open-source code freely available on GitHub.

More Aspire CREATE research

Our experts




Funding and Partnerships

ADAPT is co-financed by the European Regional Development Fund within the INTERREG VA France (Channel) England programme.

The MoRe-T2 project was funded by UCL Grand Challenge of Human Wellbeing.
Select publications
- Teodorescu, C.S., Fraudet, B., Leblong, E., Carlson, T., et al. (2022). Assistive Robotic Technologies for Next-Generation Smart Wheelchairs: Codesign and Modularity to Improve Users' Quality of Life. IEEE Robotics and Automation magazine, 2-14.
- Teodorescu, C., Zhang, B. & Carlson, T. (2021). A Stochastic Control Strategy for Safely Driving a Powered Wheelchair. IFAC-PapersOnLine, 53(2), 10148-10153.
- Teodorescu, C.S., Zhang, B. & Carlson, T. (2020). A rule-based assistive control algorithm for safe navigation for a powered wheelchair. European Control Conference (ECC), 2020, pp. 1204-1209.
- Devigne, L., Aggravi, M., Teodorescu, C.S., Carlson, T., et al. (2020). Power wheelchair navigation assistance using wearable vibrotactile haptics. IEEE Transactions on Haptics, 13(1), 52-58.
- Teodorescu, C., Zhang, B. & Carlson, T. (2019). Probabilistic Shared Control for a Smart Wheelchair: A Stochastic Model-Based Framework. IEEE International Conference on Systems, Man and Cybernetics (SMC), 3136-3141.
- Ezeh, C., Trautman, P., Holloway, C. & Carlson, T. (2017). Comparing shared control approaches for alternative interfaces: a wheelchair simulator experiment. IEEE International Conference on Systems, Man, and Cybernetics (SMC), 93-98.
- Devigne, L., Pasteau, F., Le Borgne, N., Carlson, T., et al. (2018). Assisting power wheelchair driving on a sidewalk: A proof of concept. Modelling, Measurement and Control C, 79(4), 185-189.
- Ezeh, C., Trautman, P., Devigne, L., Carlson, T., et al. (2017). Probabilistic vs linear blending approaches to shared control for wheelchair driving. International Conference on Rehabilitation Robotics (ICORR), 835-840.
- Ezeh, C.E.M., Holloway, C. & Carlson, T. (2016). MoRe-T2 (Mobility Research Trajectory Tracker): Validation and Application. Journal of Rehabilitation and Assistive Technologies Engineering.
Related courses

Rehabilitation Engineering & Assistive Technologies MSc
This MSc focuses on the design, development and clinical application of new rehabilitative and assistive technologies to help restore motor functions.

Physical Therapy in Musculoskeletal Healthcare & Rehabilitation MSc
This MSc teaches the scientific principles of physical therapy and allows you to experience the clinical application of specialist rehabilitation techniques.
About Aspire CREATE
We work to improve the quality of life of people with spinal cord injuries. The Centre for Rehabilitation Engineering and Assistive Technology (Aspire CREATE) is a joint research venture between UCL, the Aspire Charity, and the Royal National Orthopaedic Hospital.
How to reach us
Royal National Orthopaedic Hospital
Brockley Hill
Stanmore
HA7 4LP
- Our office: Institute of Orthopaedics and Musculoskeletal Science. (Building 6, ref. 8D.)
- Our main lab: Peripheral Nerve Injury unit. (Building 37, ref. 5E.)
It can be tricky to find your way around the site. We have created a photo guide to help you find our office.