 Close
Close

CrowdBot
Safe Navigation of Robots in Dense Human Crowds.
1 January 2018
Abstract
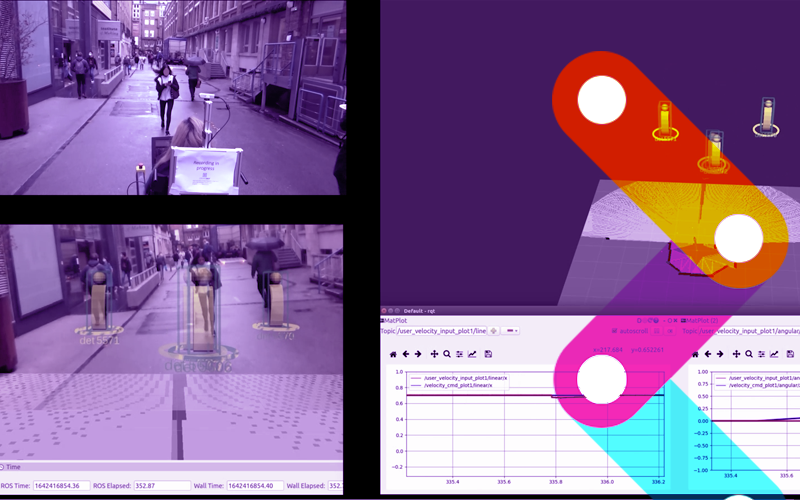
The CrowdBot Project objectives were of both a scientific/technical nature and of an ethical/regulatory nature. Through the project, we have worked with our partners to develop systems that are able to sense pedestrians, model how crowds of pedestrians behave around robots and use these models to develop algorithms that enable robots to navigate through crowds of people. We have deployed these algorithms on our smart wheelchair prototype which is able to assist the user to drive safely and efficiently in dynamic crowded environments.
Publications
- Zhang, B., Amirian, J., Eberle, H., Pettré, J., Holloway, C., & Carlson, T. (2021). From HRI to CRI: Crowd Robot Interaction - understanding the effect of robots on crowd motion. International Journal of Social Robotics. doi:10.1007/s12369-021-00812-7
- Zhang, B., Barbareschi, G., Ramirez Herrera, R., Carlson, T., & Holloway, C. (2022). Understanding Interactions for Smart Wheelchair Navigation in Crowds. Proceedings of ACM CHI Conference on Human Factors in Computing Systems.
- Eberle, H., Zhang, B., Teodorescu, C., Walker, G., & Carlson, T. (2021). An ‘Ethical Black Box’, Learning From Disagreement in Shared Control Systems. Proceedings of the IEEE International Conference On Systems, Man, and Cybernetics (SMC).
- Zhang, B., Eberle, H., Holloway, C., & Carlson, T. (2021). Design requirements and challenges for intelligent power wheelchair use in crowds: learning from expert wheelchair users. Proceedings of the RESNA Annual Conference 2021.
- Zhang, B., Holloway, C., & Carlson, T. (2020). A hierarchical design for shared-control wheelchair navigation in dynamic environments. Proceedings of the IEEE International Conference On Systems, Man, and Cybernetics (SMC)
- Eberle, H., Zhang, B., Mathibela, B., Walker, G., Teodorescu, C., Holloway, C., & Carlson, T. (2020). Autonomy vs. Safety in Shared Control Crowd Navigation. In Proceedings of Robots from Pathways to Crowds: Ethical, Legal and Safety Concerns of Robots Navigating Human Environments, Workshop at Ro-Man
- Zhang, B., Holloway, C., Carlson, T., & Ramirez Herrera, R. (2019). Shared-control in Wheelchairs – Building Interaction Bridges. CHI '19 Workshop: Weaving the Threads of Vehicle Automation.