 Close
Close

This page has been created to share results from recent activities in the area of photogrammetry and 3D imaging. Please note, this page is constantly evolving.
About
This page shares Projects and datasets from recent activities in the area of photogrammetry and 3D imaging. We maintain a public research library on Zotero. You can also follow our public YouTube channel. Our research interests cover:
- Point clouds
- Photogrammetry
- 3D imaging
- Digital Twins
- Building information modelling (BIM)
- Infrastructure Inspection
- Indoor modelling and augmented reality
- Body scanning
Projects & Data Sets
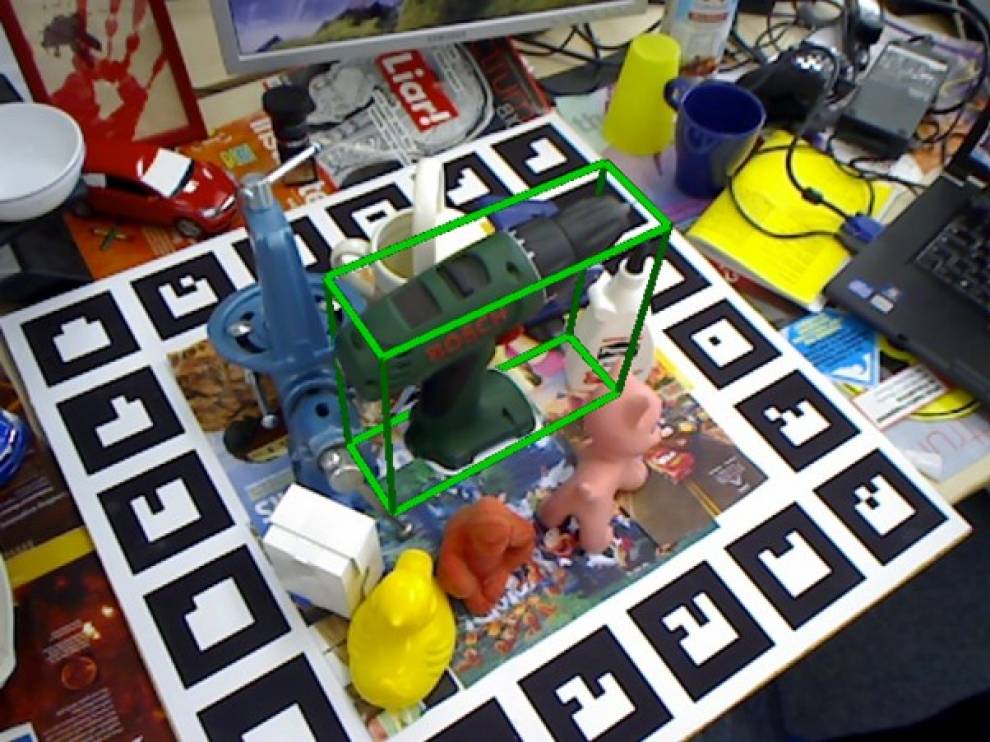 | Curiosity-driven 3D Object Detection without LabelsWe present a novel method for self-supervised scene parameterisation from a single image and geometric representation. We achieve this by employing analysis-by-synthesis using a differentiable renderer. We show that a simple L2 loss is not sufficient for such a task. Instead, we introduce a GAN-like critic to constrain the network to propose realistic outputs. By adding such a constraint, we observe the L2 loss is now sufficient to solve a number of tasks on both synthetic and real data. |
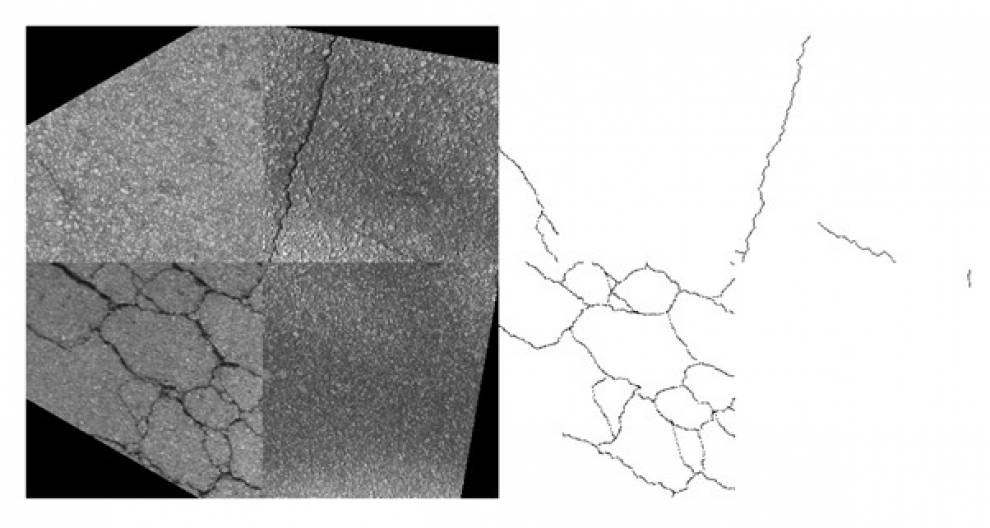 | Semantic segmentation of cracks: Data challenges and architectureDeep Learning (DL) semantic image segmentation is a technique used in several fields of research. The present paper analyses semantic crack segmentation as a case study to review the up-to-date research on semantic segmentation in the presence of fine structures and the effectiveness of established approaches to address the inherent class imbalance issue. The established UNet architecture is tested against networks consisting exclusively of stacked convolution without pooling layers (straight networks), with regard to the resolution of their segmentation results. Publication: Publisher |
 | A review on deep learning techniques for 3D sensed data classificationWe present a full state-of-the-art review on deep learning techniques for classification of point cloud data. The paper covers all recent research approaches from classical machine learning methods, RGB-D, voxel, multi-view to raw point cloud processing. Publication: Publisher |
Open ML Training Data For Visual Tagging Of Construction-specific Objects (ConTag)ML technology has enabled a revolutionary leap in many digital economies generating growth in activity and business mainly for the ITC sector. Part of the growth is generated through sharing of IP, knowledge, tools and datasets. We want to adopt this approach for the digital construction sector. ConTag will provide visual and 3D training dataset and pre-trained deep neural networks (DNN) to benchmark against. We expect this shared and open datasets to kick-start further ML developments in both academia and industry. Video: Youtube | |
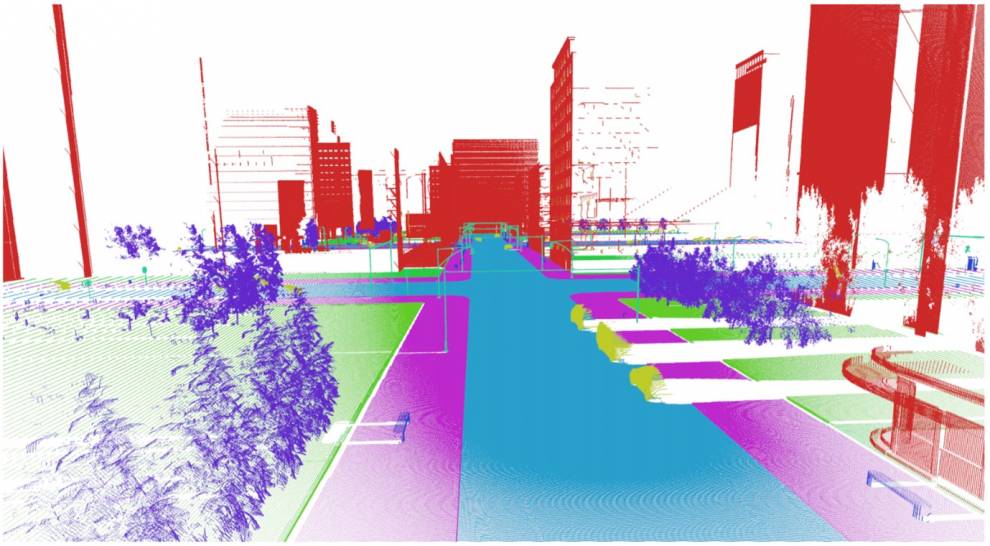 | SynthCity: A large scale synthetic point cloudSynthCity is a fully synthetic Mobile Laser Scanner (MLS) point cloud. We create SynthCity using the open-source blender and blensor packages. We show that synthetic MLS datasets can be easily generated with full semantic labels. Such data can therefore be used for training machine/deep learning models. Project: Link |
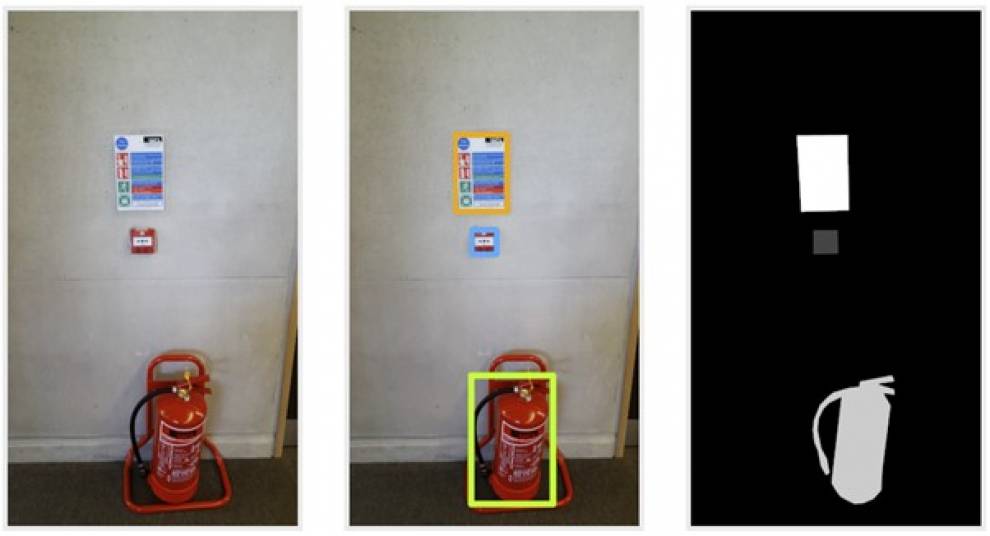 | FireNet: An image collection of fire safety equipment.FireNet is an open ML training dataset for visual recognition of fire safety equipment. Our dataset directly links the objects to their respective Uniclass, the construction sector’s classification scheme to name objects. FireNet has been designed as a ML training dataset for experimentation and therefore fulfils multiple machine learning scenarios (classification, object detection, semantic segmentation). Project: Link |
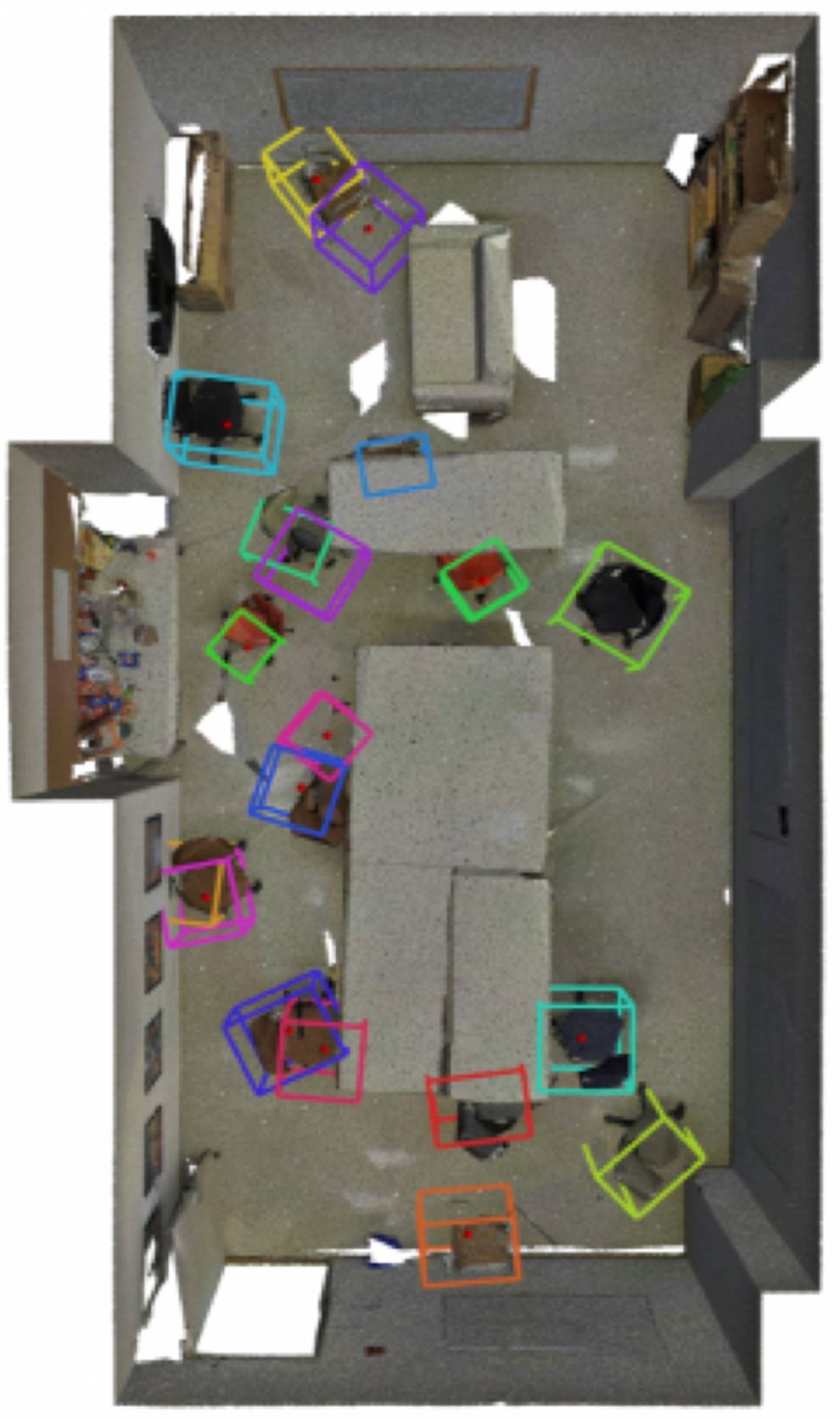 | Finding Your (3D) Center: 3D object detection using a learned lossWe present a novel approach to training for point cloud object detection. By employing two networks, we show how first a smaller local network can be trained with a fraction of the required training data. We then demonstrate how this first network can be used as a loss function to train a second full scene network without the need for labels. Publication: PDF |
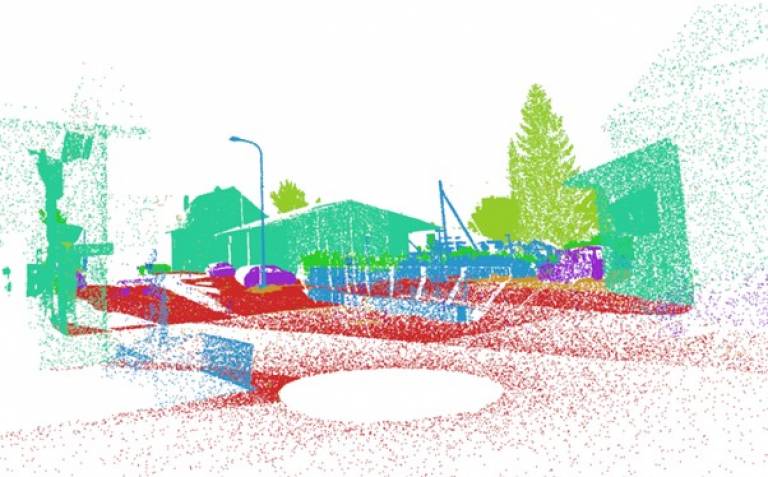
 | Semantic Segmentation of Terrestrial LIDAR Data Using Co-Registered RGB DataThis paper proposes a semantic segmentation pipeline for terrestrial laser scanning data. We achieve this by combining co-registered RGB and 3D point cloud information. Semantic segmentation is performed by applying a pre-trained off-the-shelf 2D convolutional neural network over a set of projected images extracted from a panoramic photograph. Publication: Publisher |
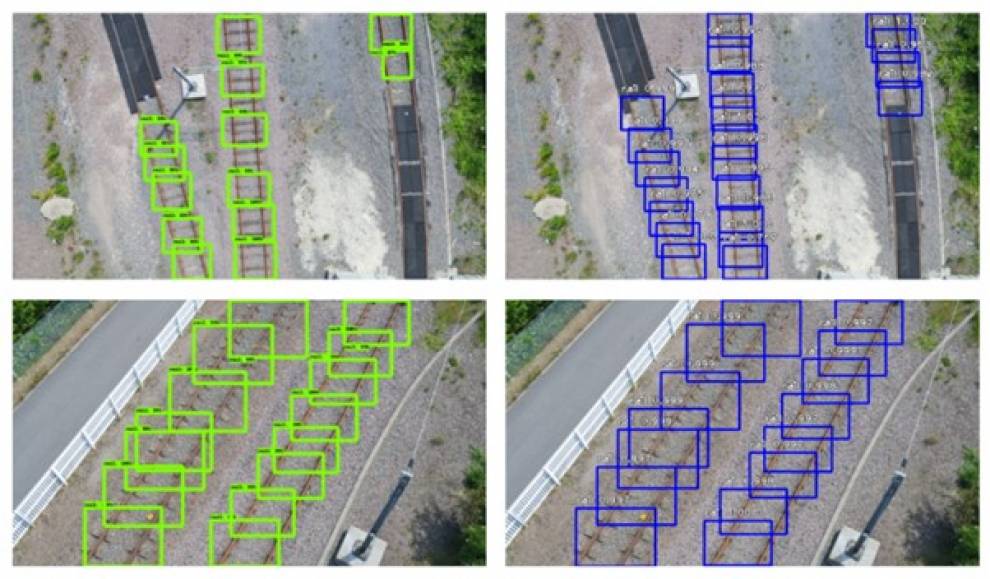 | Rapid object detection systems, utilising deep learning and unmanned aerial systems (UAS) for civil engineering applicationsLinear topologies can be challenging terrains for Structure-from-Motion pipelines. A key source of error is caused by intrinsic camera distortions. We demonstrate through effective camera pre-calibration, distortions can be significantly reduced in such applications. Ultimately increasing the accuracy of derived Digital Surface Models (DEMs). Publication: Publisher |
 | Initial Investigation of a Low-Cost Automotive LIDAR systemThis investigation focuses on the performance assessment of a low-cost automotive LIDAR, the Livox Mid-40 series. The work aims to examine the qualities of the sensor in terms of ranging, repeatability and accuracy. Publication: Publisher |
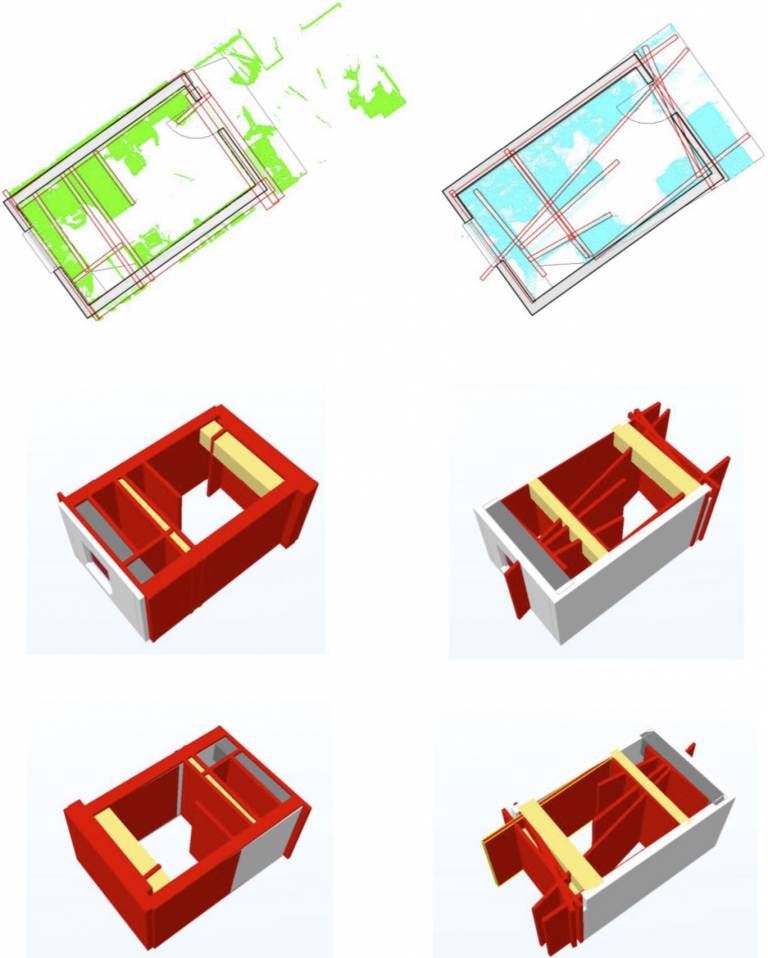 | Automatic Geometry Generation from Point Clouds for BIMThe need for better 3D documentation of the built environment has come to the fore in recent years, led primarily by city modelling at the large scale and Building Information Modelling (BIM) at the smaller scale. Automation is seen as desirable as it removes the time-consuming and therefore costly amount of human intervention in the process of model generation. BIM is the focus of this paper as not only is there a commercial need, as will be shown by the number of commercial solutions, but also wide research interest due to the aspiration of automated 3D models from both Geomatics and Computer Science communities. Publication: Publisher |
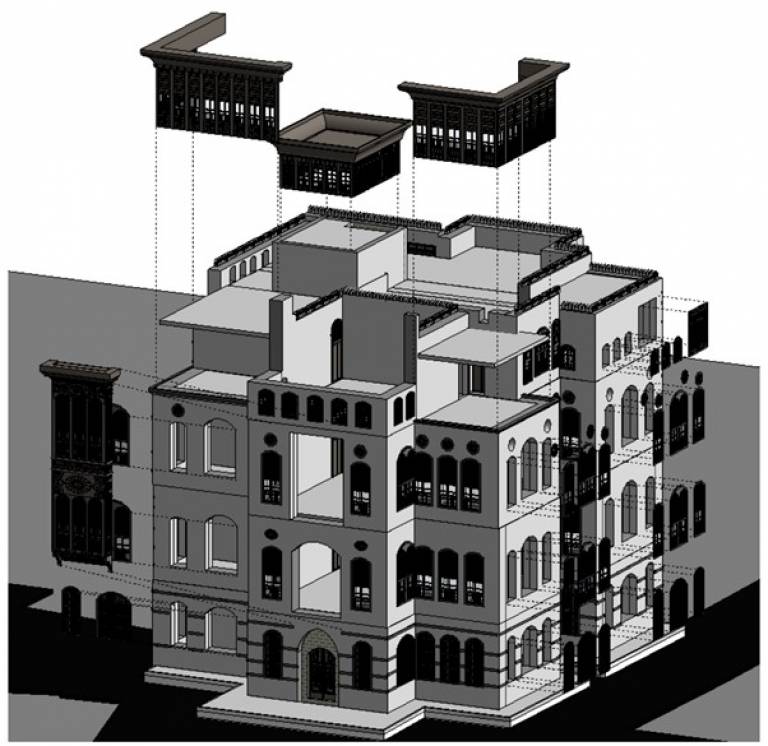 | Jeddah Heritage BIMAs with many historical buildings around the world, building façades are of special interest; moreover, the details of such windows, stonework, and ornaments give each historic building its individual character. From this standpoint, the Hijazi Architectural Objects Library (HAOL) has reproduced Hijazi elements as 3D computer models, which are modelled using a Revit Family (RFA). The Hijazi Object such as Roshan and Mashrabiyah, become as vocabulary of many Islamic cities in the Hijazi region such as Jeddah in Saudi Arabia, and even for a number of Islamic historic cities such as Istanbul and Cairo Publication: Publisher Publication: Publisher |
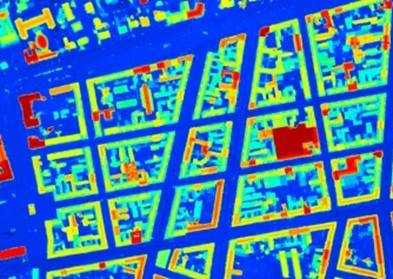 | Improving public data for building segmentation from Convolutional Neural Networks for fused airborne lidar and image data using active contoursManually labelling buildings for segmentation is a time consuming task. We show that readily available GIS mapping data such as that from the Ordnance Survey (UK) can be used as training data. Further, we develop a novel pipeline which uses Active Contour models and fued image-lidar data to achieve state-of-the-art accuracy in aerial building segmentation. Publication: Publisher |
 | Close-Range Photogrammetry and 3D ImagingThis is the third edition of the well-known guide to close-range photogrammetry. It provides a thorough presentation of the methods, mathematics, systems and applications which comprise the subject of close-range photogrammetry, which uses accurate imaging techniques to analyse the three-dimensional shape of a wide range of manufactured and natural objects. Publication: Publisher |
 | Weighted point cloud augmentation for neural network training data class-imbalanceA key issue when training deep neural networks for outdoor point clouds is the inevitable large data imbalance. For example, a typical street scene will contain orders of magnitudes more ground points than street furniture. We develop a novel solution to apply a weighted augmentation to physically decrease the class-imbalance. Publication: Publisher |
IQmulus - A High-volume Fusion and Analysis Platform for Geospatial Point Clouds, Coverages and Volumetric Data SetsFor geospatial applications, huge amounts of heterogeneous data sets of different topology are collected nowadays with different data acquisition techniques. Especially airborne and mobile platform LIDAR data are becoming ubiquitous, but SAR and stereophotogrammetry also contribute to the rapid growth of geotopographical data sets to sizes of tens to hundreds of TBs. Due to the problems of handling such large data volumes and the difficulty of fusing point clouds of heterogeneous provenance, rasters, volumetric data and 2D vector data, many of those new data sets are not used appropriately or not at all.Therefore IQmulus is targeting to enable optimized use of large, heterogeneous geo-spatial data sets for better decision making through a high-volume fusion and analysis information management platform. Project: Cordis |
See the complete list of publications ordered by year below.
People
- Dr Jan Boehm
- June Moh Goo
- Zichao Zheng
- Fabio Panella
- David Griffiths
- Daniel Scott
- Ahmad Baik
- Charles Thomson
- Kun Lui
- Christian Alis
Publications
- Dr Boehm's research
RPS Widget Placeholderhttps://research-reports.ucl.ac.uk/RPSDATA.SVC/pubs/JOBOE65