 Close
Close

The expected signature of a stochastic process provides a statistical summary to characterize the law of the stochastic process.
Background and Motivation
Playing a similar role to that of the moment generating function of a random variable, the expected signature of a stochastic process is of both theoretical and practical significance. For example, computation of the expected signature of the Brownian motion on [0, 1] leads to the cubature method on Wiener space (Lyons–Victoir [1]), which is a high order numerical method for high dimensional SDEs (stochastic differential equations) and semi-elliptic PDEs (partial differential equations). Besides, applications of the expected signature in machine learning contribute to the novel algorithms in generative models for synthetic time series generation.
One important theoretical question concerning the expected signature, known as the moment problem, asks if the expected signature uniquely determines the law of a random signature. A sufficient condition for the affirmative answer for the moment problem (Chevyrev–Lyons [2]) is that the radius of convergence (ROC) of the expected signature is infinite, which is satisfied by various stochastic processes on a fixed time interval, including Brownian motion. However, it is highly non-trivial to prove whether the stochastic process up to the stopping time satisfies this sufficient condition, even for the Brownian motion stopped upon the first exit time from a general bounded domain Ω. Recently, Boedihardjo–Diehl–Mezzarobba–Ni [3] showed that the stopped Brownian motion on the 2-dimensional unit disc has finite ROC. However, their method is not directly applicable for a general domain. In addition, even for the case of the unit disc, it remains unknown if the stopped Brownian motion starting at a point apart from the centre has finite ROC.
Project Objectives
The project aims to investigate whether the ROC of the expected signature of the Brownian motion up to the first exit time from a general domain Ω is finite.
Methodologies and Research Findings
The main result of our work [4] gives a complete solution to the finiteness problem of the expected signature of stopped Brownian motions on bounded domains under mild regularity assumptions, for all dimensions up to 8:
Theorem 1. Let Ω be bounded C²‧ᵅ -domain in Rᵈ; 2 ≤ d ≤ 8. The expected signature Φ of a Brownian motion stopped upon the first exit time from Ω has finite ROC at every point in Ω.
A key ingredient of our proof is the introduction of a “domain-averaging hyperbolic development”, which allows us to symmetrize the PDE system for the hyperbolic development of expected signature by averaging over rotated domains.
Hyperbolic development
The proof in Boedihardjo–Diehl–Mezzarobba–Ni [3] for the 2-D disc relies crucially on the technique of hyperbolic development. Indeed, by taking the hyperbolic development, which is a morphism from the tensor algebra space to gl(3; R) and exploiting the partial symmetries of the resulting matrix-valued PDE systems, a nested system of three ODEs has been obtained in [3]. These ODEs can be solved explicitly, from which one deduces the finiteness of ROC. However, [3] relies heavily on the rotational invariance of the domain, thus making it difficult to be extended to general domains.
Domain-averaging hyperbolic development and PDE symmetrization
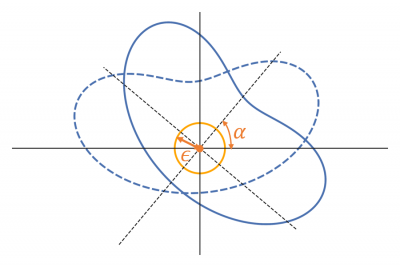
We extended the techniques used in [3] to a general domain by averaging the hyperbolic development of expected signature over the rotated images of the domain, which is the “domain-averaging development” denoted by Hλ,Ω(z). Hλ,Ω(z) satisfies the below properties:
- Hλ,Ω(z) is rotationally invariant (with respect the domain rotations);
- Hλ,Ω(z) satisfies the same PDE as that for Hλ,Ω; and
- Hλ,Ω(z) inherits the finiteness of radius of convergence from the non-averaged hyperbolic development Hλ,Ω of the expected signature. Thus, the operation of domain averaging preserves the lower bound for ROC of the hyperbolic development.
Working locally near z ∈ Ω, we arrive at the same PDE for Hλ,Ω(z) as for its non-averaged analogue on a small ball around z. Loosely speaking, “half” of the boundary conditions will go missing for the PDE for Hλ,Ω(z); nevertheless, geometric properties of the hyperbolic development enable us to establish uniform lower bounds for the remaining component of Hλ,Ω(z) . We solved the domain-averaging hyperbolic development Hλ,Ω(z) explicitly and by using computer-assisted proof we conclude the finite ROC of expected signature for 2 ≤ d ≤ 8.
The preprint of this work can be found on arxiv.
The supplementary Maple codes to prove the finite ROC can be found on GitHub.
Future Work
For d > 8, it is still unclear whether expected signature of stopped Brownian motion has a finite ROC. The main bottleneck lies in the estimates of the denominator of Hλ,Ω(z) using the Bessel functions. Besides, it would be interesting to explore the PDE approach for computing the expected signature of Brownian motion on the manifold and the decay rate of the expected signature. Moreover, we are interested in the expected signature of other stochastic processes, such as Fractional Brownian motion and Schramm–Loewner evolution.
Researchers
Hao Ni
Siran Li, New York University of Shanghai
Contact Information
Hao Ni: h.ni@ucl.ac.uk.
Reference
- Lyons, T. and Victoir, N., 2004. Cubature on Wiener space. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences, 460(2041), pp.169-198.
- Chevyrev, I. and Lyons, T., 2016. Characteristic functions of measures on geometric rough paths. The Annals of Probability, 44(6), pp.4049-4082.
- Boedihardjo, H., Diehl, J., Mezzarobba, M. and Ni, H., 2021. The expected signature of Brownian motion stopped on the boundary of a circle has finite radius of convergence. Bulletin of the London Mathematical Society, 53(1), pp.285-299.
- Li, S. and Ni, H., 2020. The expected signature of stopped Brownian motions on 2D domains has finite radius of convergence everywhere. arXiv preprint arXiv:2011.07917.