 Close
Close

This is the publicly available dataset from robot-assisted laparoscopic hysterectomy surgery providing a benchmark for designing and validating smoke removal algorithms.
Overview
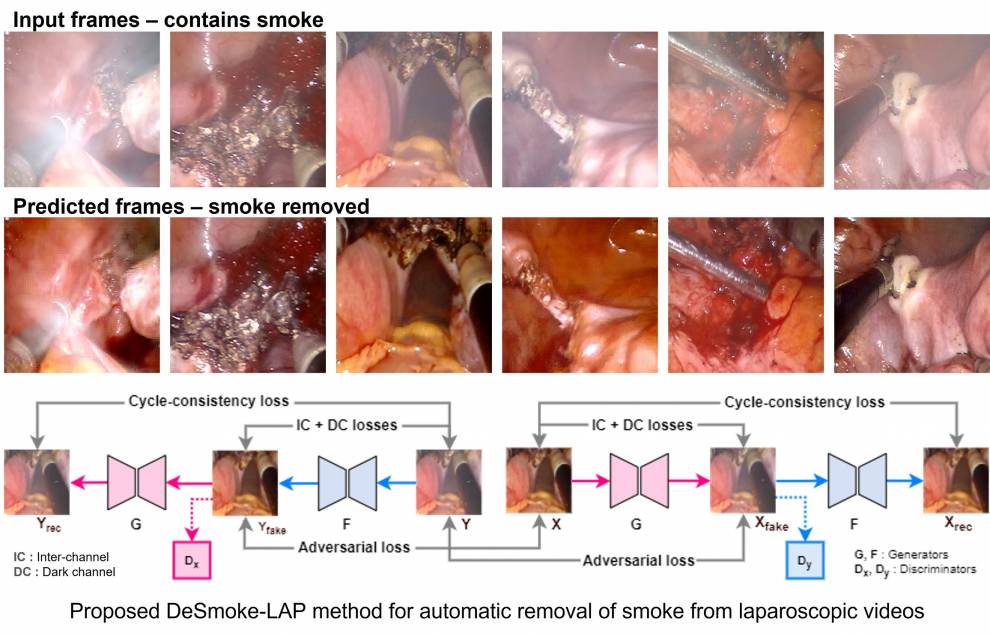
The laparoscopic surgery dataset is associated with our International Journal of Computer Assisted Radiology and Surgery (IJCARS) publication titled “DeSmoke-LAP: Improved Unpaired Image-to-Image Translation for Desmoking in Laparoscopic Surgery”. The training model of the proposed method is available as an open source on Github. We propose DeSmoke-LAP, a new method for removing smoke from real robotic laparoscopic hysterectomy videos. The proposed method is based on the unpaired image-to-image cycle-consistent generative adversarial network in which two novel loss functions, namely, inter-channel discrepancies and dark channel prior.
The dataset contains frames and video clips from 10 robot-assisted laparoscopic hysterectomy procedure videos. The original videos were decomposed into frames at 1 fps. From each video, 300 hazy images and 300 clear images were manually selected by observing the electrocauterisation. A short video clip of 50 frames from each procedure was also selected that was utilised for testing. 5-fold cross-validation was performed for all methods under comparison. Quantitative evaluation was done using referenceless metrics and qualitative evaluation was performed through a survey filled out by end-users (surgeons).
Downloading the Dataset
This dataset has been released. You can download the data set here.
License
The DeSmoke-LAP Dataset is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0).
Citing the Dataset
Please cite the following publication whenever research making use of this dataset is reported in any academic publication or research report:
Contact
For comments, suggestions or feedback, or if you experience any problems with this website or the dataset, please contact Yirou Pan and Sophia Bano. To find out more about our research team, visit the Surgical Robot Vision and Wellcome / EPSRC Centre for Interventional and Surgical Science websites.