Gravity, the shape of the Earth, isostasy, moment of
inertia
Gravity is
one of the four fundamental forces (the others are the electromagnetic, the
weak force and the strong force) and probably the least well understood. The basic
concepts were formulated by Newton in the 17th century.
These were
deductions from Kepler’s
Laws of
planetary motion.
Johannes
Kepler (1571 - 1630), working with data painstakingly
collected by Tycho Brahe without the
aid of a telescope, developed three laws which described the motion of the
planets across the sky.

1.
The Law of Orbits: All
planets move in elliptical orbits, with the sun at one focus.
2.
The Law of Areas: A
line that connects a planet to the sun sweeps out equal areas in equal times.
3.
The Law of Periods:
The square of the period of any planet is proportional to the cube of the semi
major axis of its orbit.
Kepler's
laws were derived for orbits around the sun, but they apply to satellite orbits
as well.
Remember the last £1 note?
Isaac Newton is on the back,
and an artist has rendered a planetary diagram next to him.
What's wrong with this
picture?

Answer: They've
put the sun at the centre of the ellipse!
Many questions remain:
How
do masses actually attract each other?
Are
there GRAVITONS?
Is
there a “Fifth Force”?
Can
the fundamental forces be unified…..
However,
gravitational attraction is an everyday experience and its variations provide
insights into Earth structure. Early studies used either the periods of
oscillation of pendulums or 'deflections of the vertical' measured by
observations of fixed stars to measure gravity.

Using
reported in
1755 to the Royal Society an estimate of the mass of the Earth obtained by
observations of the deflections on either side of Schiehallion, a mountain of
almost perfectly triangular cross-section in the Scottish highlands.
A few years
earlier the French scientist Bouguer noted that the
gravitational attraction of the
Basic
Relations
Described by
F = G m1 m2 / r2
F = force acting between two point masses
m1, m2 = the masses
r = separation of the two masses
G = Universal gravitational constant = 6.67 x 10-11 Nm2kg-2
How do we know G???
The
value of G, the universal gravitational constant, was determined by Henry Cavendish (1731 1810) using the apparatus shown here:
There is a
gravitational attraction between the large lead balls M and the small balls m.
This results in a slight twisting of the quartz fiber. When the large lead
balls are shifted as shown in the upper left of the illustration, the direction
of twist is reversed. This movement is amplified and measured by the deflection
of a beam of light reflected from the mirror and projected on a ruled scale
some distance away. The force corresponding to the twisting of the quartz fiber
was previously calibrated using light weights.
Cavendish was terrified
of women, and communicated with his female servants by notes.

Newton also found that on Earth:
F=m.g
Where m is a
bodies mass, and g is the acceleration due to gravity. But a body of mass m is
attracted to the Earth by gravity, with a force:
F = G mM/ R2
Where M is
the mass of the Earth, and R is its radius (~6400 km – how do we know this??). It follows that:-
m.g= G.m.M/ R2
g = G.M / R2
The units of g are Newton.kg-1 (force per
unit mass) or (more commonly), m.s-2 (acceleration). Numerically,
these are identical and:
g ~9.81 ms-2 .
In fact g
can be obtained from the period of a pendulum, and so the equation:
g = G.M / R2
is used to
determine:
M = 5.9742 × 1024 kilograms
Geologically,
the density of earth is very important. If ρ is the average density of the Earth, then
ρ = mass/volume = M / [(4/3)πR3]
= 3M / 4πR3
We can substitute for M using the relationship between it and g, i.e. M =
R2g / G. Therefore:
ρ = 3g / 4πRG
Thus if we know g, R and G, we can calculate ρ.
With current values:-
ρ = 5.52 x 103 kgm-3
Since most surface rocks have densities in the range
2-3 x 103kg.m-3, density
must increase with depth in Earth. This has also been confirmed by
seismology, since seismic velocities, which are strongly correlated with
density, increase with depth.
However, we would also like to monitor lateral density
variations. We cannot easily measure density at depth, but it is quite easy to
measure g at different places on the surface of the Earth.
How
do we Measure Gravity?
•
Pendulum
•
Mass Dropping
•
Gravimeter
•
Pendulum
•
Period
of swing = T
![]()
•
Mass Dropping
•
Distance
traveled in time t’ = L

•
Both
absolute measurements
•
Both
methods independent of mass, m.
•
Both
methods should give g ~ 9.81 ms-2
·
Gravimeters
Neither
pendulums nor weight drop chambers are suitable for routine field use and
instead spring-balance gravity meters are used to estimate changes in g.
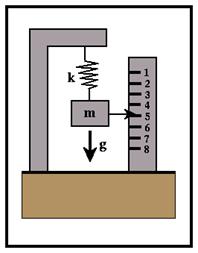
•
Gravitational
force on a mass is balanced by a force exerted on a stretched spring
•
m.g = k.x
x = stretch in spring, k is spring compliance
•
Instrument
must be stabilised against thermal fluctuations
•
Spring
made of fused silica - low coefficient of thermal expansion
•
Accurate
to 1 part in 108
•
Common
makes - Worden, Lacoste
•
Gravimeters
expensive and fragile
•
Gravimeter
measures difference in gravity between 2 locations
•
g
= cR c = calibration coefficient
Linking such
measurements to places where absolute values are known allows us to determine
absolute values with gravimeters.

Worden Meter
Gravity
and the Shape of the Earth
The
variation of g over the surface of the globe is important because it provides
information on variations in the shape
and internal structure of the Earth.
If we
rearrange F = G mM/ R2 substituting for M via ρ = mass/volume =
M / [(4/3)πR3] = 3M / 4πR3, we obtain:
g = 4π ρ RG / 3
If the Earth were a perfect sphere of uniform density, g would be constant over
its entire surface. But if the Earth deviates from spherical (i.e. if R varies)
or if there is a local density anomaly, g will vary.
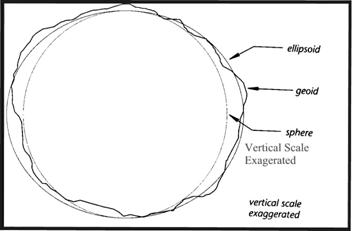
The Earth is
not spherical, but an ellipsoid of
revolution i.e. it is flattened at
the Poles - this is a rotational effect
(see detailed notes).
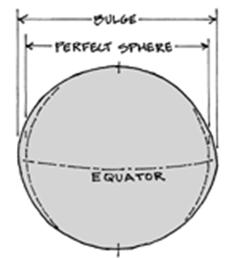
Satellite
studies have provided a very accurate measure of ellipticity:-
equatorial radius = 6378 km.
polar radius = 6356.6 km.
Flattening = (6378 - 6356.6 )/ 6378
= 1 / 298.26
Now since
g = GM / R2, g
will be larger where R is smaller. Therefore g at the poles is larger than g at the Equator.
g is also
affected by the fact that the Earth rotates and an observer on its surface
therefore experiences a centrifugal force.
We can
summarise by saying:
(1) If the Earth were a non-rotating perfect sphere,
the acceleration due to gravity would be constant.
(2) Because
of rotation, the Earth is flattened at poles. This affects g in two ways:-
(a) g at the poles is greater than g at the equator because R at the
poles is less than R at the equator.
(b)
rotational force at the Earth surface is at right angles to the axis of
rotation and proportional to the distance from that axis. It is therefore
zero at the poles and a maximum at the Equator. It acts outwards, reducing g.
The net gravitational force at the surface of Earth is equal to the resultant of the forces due to internal mass and the centrifugal action. If the gravitational
force due to M is a = GM / R2
and the centrifugal force is c, then the total
effective gravitational force is b the vector sum of a
and c.
However, b does not act towards
the centre of Earth, but at right
angles to the surface of the elliptical Earth:
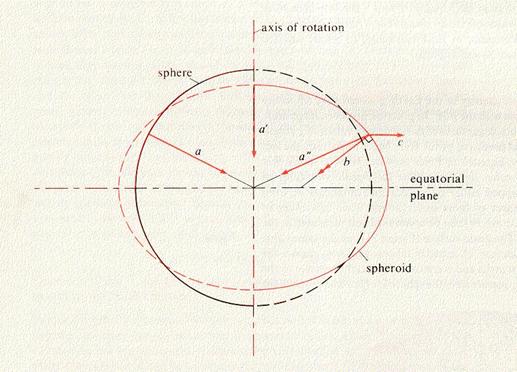
Thus a
perfectly homogeneous plastic body will deform until the combination of a and c
meets this criterion. In mathematical jargon, the surface of the ellipsoid is
an equipotential surface.
The ideal
(ellipsoidal) mean sea level surface is called the Earth ellipsoid or (Earth)
spheroid. The gravitational force over the spheroid varies, with a maximum at the poles (where c = 0) and a minimum at the equator (where c is a
maximum).
The
gravitational acceleration on the surface of the spheroid is given by the International
Gravity Formula (IGF).
g = 9.780318 (1 + a sin2(λ) - b sin2
(2λ))
where g = sea-level gravitational acceleration on the spheroid and λ =
latitude, and a = 0.0053024 and b = 0.00000587
g at Equator (lat = 0) = 9.780318 m.s-2
g at Pole (lat = 90) = 9.832177 m.s-2
The
difference amounts to approximately a half of one percent. The value of the
theoretical or normal gravity varies smoothly between the two extremes, but
inhomogeneities in the Earth produce shorter wavelength perturbations in the
smooth curve.
Variation
of gravity with height
At Q (h=0,
ie surface) 
•
 g =
GM/r2
g =
GM/r2
At P (h=h)
•
g = GM/(r+h)2
•
g decreases with height
gradient
= dg/dh = -2g/R
= 3.086x10-6 ms-2/m
= 3.086 gu/m
Units of
gravitational acceleration
•
1 gu = 10-6ms-2
•
1 mgal = 10-5 ms-2
•
10 gu = 1 mgal
Variation of gravity through the Earth
At
surface
 g = GM/r2
g = GM/r2
In the
Interior, at some radius, r
g(r)
= gMI + gMO
gMI
= GMI/r2
gMO
= 0
•
g(r)
= GMI/r2
What is MI?
MI
= (4/3)πr3ρ
· g(r) =
(4/3)πrρG
•
gravity
is zero at Earth’s centre
•
In
reality the depth curve varies from simple equation because core is much denser
than mantle
Effect of
Inhomogeneities: the Geoid
Large-scale
inhomogeneities produce departures of the measured values of g at sea-level
from those predicted by the I.G.F. The fact that g does not vary smoothly from
equator to pole provides evidence that there are lateral inhomogeneities within
the Earth.
Values of g
can be determined by surface measurements and by satellite studies.
The real sea
level equipotential surface is known as the geoid and has
"highs" and "lows" relative to the spheroid. Contours of
the geoid give the height, above or below the spheroid, by which sea level
actually varies over the Earth's surface.
Sea-level is
+54 metres higher in the
The geoid
map may be divided into large positive and negative regions (above and below
spheroid surface). Most positive features correspond to active magmatic
regions:-
e.g.
Mid-Atlantic Ridge,The Andes, The Philippines
Negative features are centred over old, inactive ocean
basins and continents:-
e.g.
Major physical undulations (e.g. mountains) are NOT associated with geoid anomalies, and so they must be balanced
by deeper seated mass excesses or deficiencies (Isostasy – see below).
It is
believed that long wavelength undulations in the geoid reflect the convective
system in the mantle, or some other deep phenomena (e.g. undulations on
the outer surface of the core).
The problem
is complex because of the effects of flow dynamics. Thus, an upwelling should
be characterised by low density, which would produce a negative geoid anomaly,
but the convective motion deflects the surface and so produces a +ve anomaly.
Crustal
Gravity Anomalies
In addition
to the global anomalies due to convection, there are smaller scale effects
because of crustal inhomogeneities (sedimentary basins, intrusions, etc.).
Their
analysis is important in exploration for natural resources, but they also need
to be taken into account in global scale investigations and surveys (see also
detailed notes).

In a gravity
survey we measure the difference in gravity between survey points (S) and a
reference station (P), using a gravity meter.
Ideally P is
either an international gravity reference station or has been linked to such a
station by gravity measurements.
Inevitably,
the differences will be small and the m.s-2 is far too large a unit.
Gravity
anomalies are therefore measured in gravity
units.
1 g.u. = 10-6 m.s-2
(An older
unit, the milligal, abbreviated as mGal, is still in common use. 1 mGal = 10
g.u.)
Since g is
approximately 10 m.s-2, 1 g.u. is about one ten millionth of the
absolute value of gravity at Earth’s surface.
What causes gravity anomalies?
•
If
ρ1 ≠ ρ2 then there is a local mass excess
or mass deficiency in the vicinity of the geological body causing a local very
small variation in the value of g
•
positive
anomaly if ρ2 > ρ1 
•
negative
anomaly if ρ2 < ρ1
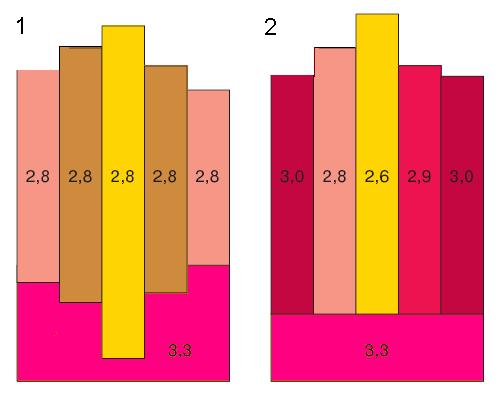
Densities
of common rocks and Earth material
•
water
1 Mg m-3 (old units g/cc)
•
granite
2.5 => 2.7 Mg m-3
•
limestone
2.66 => 2.7 Mg m-3
•
sandstone
1.8 => 2.7 Mg m-3
•
basalt
2.7 => 3.2 Mg m-3
•
coal
1.2 => 1.5 Mg m-3
•
rock
salt 2.1 => 2.5 Mg m-3
•
average
density of crust 2.85 Mg m-3
•
average
density of mantle 3.3 Mg m-3
•
average
density of Earth 5.5 Mg m-3
Most gravity
meters can detect changes in gravity of as little as 0.1 g.u., and need to, as mineable
deposits of metals such as copper, lead, zinc, nickel and iron have been
discovered on the basis of anomalies of less than 5 g.u.
Underground
cavities which could represent hazards to e.g. motorways or airstrips may give
rise to effects of only a few tenths of a g.u. .
So a local
survey might give:
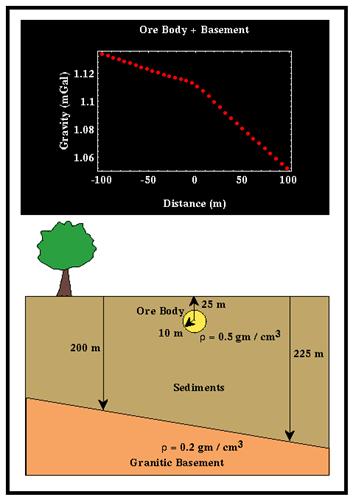
Can fit to
background, and get the difference to show up ore body:
Gravity Corrections
The measured
value of gravity at a field station might vary from the value at the base
station for a variety of reasons, even if there were no crustal or geoid anomalies.
Once the
value has been obtained it must be corrected
to account for effects such as:-
(1) Latitude differences
(2) Elevation effects
(3) Topographic effects
Any differences that remain after these corrections have been made must be due
to real lateral variations in density.
Latitude Correction
We have seen
that gravity on the surface of a homogeneous Earth varies from pole to equator
because of effect of centrifugal force and polar flattening.
Thus if
stations are at different latitudes, we would expect gravity to be different.
We use the IGF to describe the latitude effect.
For small
N-S distances (up to a few km) the difference in gravity due to latitude at
latitude λ is approximately:-
ΔgLAT = 8.1 sin(2
λ) g.u. per km
Free-air Correction
If stations
are at different elevations, we would expect gravity to be different because of
the different distances to the centre of the Earth.
The effect
for a positive height (h) above sea-level is
approximately equal to -3.086
g.u./metre,
an increase in height produces a decrease in gravity. So gground-level
> ghighup
ΔgELEV = -3.086h g.u.
The
correction, known as the free-air
correction (because, in the derivation, it is assumed that the only
material between the station and the reference surface is air), must therefore
be positive. So Δg is added to ghigh-up
to bring it into line with the reference gground-level.
Note that if
the gravity anomaly is to be measured to within 0.1 g.u., the station elevation
(h) must be known to within 3 cm!
Gravity corrections require accurate
elevations, and getting these is often the most expensive part of a gravity
survey.
Free air
gravity survey is often used for marine studies, e.g.
Bouguer Correction
The free-air
correction assumes that only air exists between the station and the reference
surface. In reality, a normal gravity station on land will be underlain by
rock, of density ρ, which exerts a positive (downwards) gravitational
pull.
The Bouguer
correction adds to the free-air correction a simple approximation for the
effect of this rock column.
We assume
that the gravity effect of the real topography can be approximated by the effect
of a uniform flat plate, density ρ (in kgm-3) and thickness h,
extending to infinity.
This effect
is given by:-
ΔgROCK = 2π G ρ h = 41.91 x 10-5ρ
h g.u.
The effect is positive (ie it increases the gravity field) and therefore the
correction for the presence of rock must be negative.
For granite
ρ is approximately 2670 kg m-3, and this has been adopted as a
“standard” density for the upper crust, giving a correction of -1.118
g.u./metre.
Other densities
may be used to suit the local geology, but use of the standard density has the
virtue of ensuring compatibility between maps of adjacent areas.
Since the
free-air correction is 3.086 g.u./metre, but when the effect of
intervening rock is considered the net correction is reduced, so that the net
elevation correction, the Bouguer
Correction, is about 1.968 g.u./meter, implying that elevations of
gravity stations should be known to the nearest 5 cm.
So in this
case, again, gground-level > ghigh-up, but much less
than in the free-air case due to the intervening rock.
Terrain Correction
Although the
Bouguer correction works surprisingly well, it is inadequate for high precision
surveys or for surveys carried out in topographically rugged areas.
If the
station is next to a mountain or valley, the mass difference of the topographic
feature from the Bouguer plate will affect the measured gravity field.
A mountain
will attract upwards, and so reduce the value of gravity measured.
______g1______________________________________________g2_∧
g1
> g2, so Δg is added to g2 to bring it into line
with the reference g1
![]() A valley will
not attract as much as it should if it were filled with rock and so will also give rise to a gravity value which
is smaller than
would be expected.
A valley will
not attract as much as it should if it were filled with rock and so will also give rise to a gravity value which
is smaller than
would be expected.
______g1______________________________________________g2_ ________
g1
> g2, so Δg is added to g2 to bring it into line
with the reference g1
Thus terrain correction must be positive to give corrected gravity
differences.
Values can
be obtained from standard tables for average elevations estimated using
graticules overlaid on maps with topographic contours, or by computer programs
operating on some form of Digital Terrain Model (DTM).
The
combination of terrain and Bouguer corrections is call the topographic correction.
Once all the
corrections have been made, the reduced
gravity records variations in gravity field due solely to subsurface density
variations.
If only the
latitude and free-air corrections have been applied, the quantity calculated is
known as the free-air gravity (free-air
anomaly).
If, in
addition, the Bouguer correction has been applied, the quantity is known as the
(simple) Bouger gravity (or
anomaly).
If, in
addition, terrain corrections have been made, the quantity is known as the extended Bouger gravity or complete Bouger gravity (or anomaly).
Density
variations below land areas are
best studied via the Bouguer gravity, since this takes into account all relief
effects and leaves data corrected down to sea-level (unless there are
significant density variations within the topography above sea level).
Color shaded-relief map showing the complete-Bouguer gravity anomaly
data for the conterminous United States (onshore) and free-air gravity anomaly
data offshore. Red shades indicate
areas of high gravity values produced by high average densities in the Earth's
crust and upper mantle; blue shades indicate areas of low gravity values
produced by low average densities.
Isostasy
Early
geodetic and gravity measurements showed that the Andes, Himalyas and Alps did not
deflect a plumb bob as much as expected from their exposed mass. The
explanation is that the mountains have low-density roots beneath them. These
roots supply buoyancy that supports the additional mass exposed above mean sea
level; that is, variations in surface elevation are hydrostatically supported.
This is the principle of isostasy:
above some depth in the Earth (called the level
of compensation), all columns of rock exert the same pressure. The level of
compensation is the depth below which hydrostatic pressure in the Earth is
independent of location (latitude and longitude)
Isostasy
applies on a broad scale – mountain ranges, mid-ocean ridges. The basic idea is
that of flotation. Large-scale gravity anomalies indicate that the lithosphere
is hydrostatically supported, i.e., the rock column “floats” above the level of
compensation. Consequently large scale gravity anomalies reflect the structures
of the lithosphere. Some areas of the Earth, though, are not in isostatic
balance.
A gravity
survey across a mountain
range will show a negative Bouguer gravity, because mountains have low
density roots.
This isostatic balance is responsible for
their elevation.
Examples of
Bouger gravity profiles:
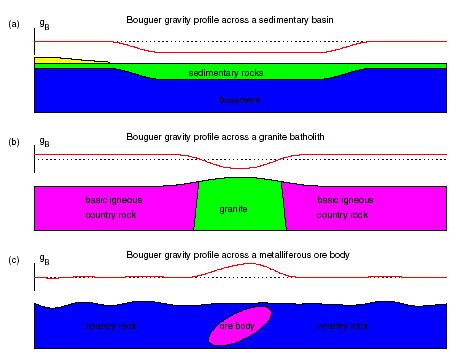
a)
density
of sedimentary rock < basement >> gravity low
b)
density
of granite less than rock >> gravity low
c)
density
of ore > rock >> gravity high
At sea, free-air
gravity is generally used
(measuring points in surface ships being generally at sea level), although
sometimes a Bouguer correction is made by infilling the sea with imaginary
rock.
Bouguer
gravity in the oceans is normally high, because the mantle surface (MOHO) is at
shallow depths, but free-air gravity is low because the oceans are in isostatic
equilibrium.
Satellite-derived free-air gravity map of
Sandwell and Smith (Nature, 1997) for the North Atlantic Ocean.
Red/yellow colours indicate gravity highs and
purple/blue colours indicate gravity lows. The large white circle on Iceland
indicates the location of the present-day plume centre at Vatnajökull (64.5° N,
17.3° W). Up to 500 km southwest along the Reykjanes ridge spreading centre,
indicated by the solid white line, asthenospheric potential temperatures of ![]() 1,450 °C result in the generation of a 14-km-thick
oceanic crust. Filled circles delineate prominent V-shaped ridges which transgress
the magnetic anomaly pattern. These ridges are symmetrical about the spreading
axis and converge southwards thus crossing progressively younger crustal
isochrons.
1,450 °C result in the generation of a 14-km-thick
oceanic crust. Filled circles delineate prominent V-shaped ridges which transgress
the magnetic anomaly pattern. These ridges are symmetrical about the spreading
axis and converge southwards thus crossing progressively younger crustal
isochrons.
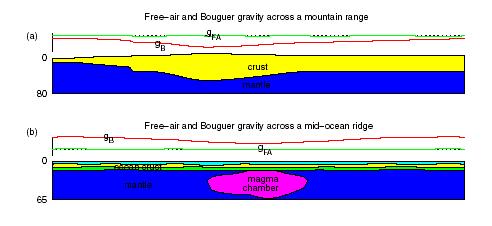
The mountain range and mid-ocean ridge are in
isostatic equilibrium, so the free-air gravity profiles are virtually flat. The
Bouger profiles show gravity lows due to the low-density mountain roots in (a)
and from the low density magma chamber in (b) (of the order of -300 g.u. and
-1000 g.u respectively).
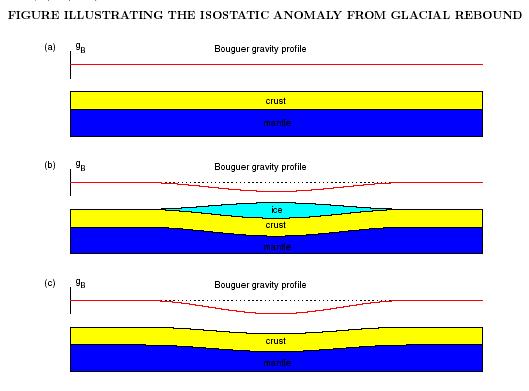
The reality
of isostasy is confirmed by the measurable uplift of Fennoscandia during the
last two hundred years as a consequence of the unloading accompanying the
melting of the ice sheets. Below the figure shows a) the crust in isostatic
equilibrium before the ice-age, b) loading of the crust by an ice-cap, and c)
the rebounding crust after the ice has melted. In b) the crust sags, forming a
root that supports the ice cap; the mantle material flows away from the
depression. The root causes a negative Bouger anomaly. When the ice melts the
crust starts to rebound and the mantle material flows back into the region. The
viscosity of the mantle is the controlling factor in the rate of rebound.
Mantle viscosities can be estimated from rates of glacial rebound
But
not all structures are in isostatic equilibrium. The Hawaiian chain is such an
example where the free-air gravity map shows highs in line with the topography,
which would not be expected from an isostatically compensated structure.
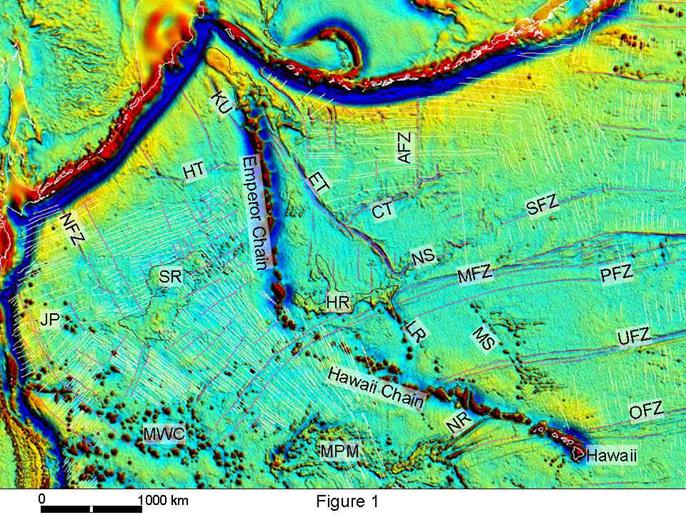
Free air gravity map of the northern Pacific showing Emperor-Hawaii seamount chain (Sandwell 13.1, 2005). Thin magenta lines are mapped fracture zones, thin yellow lines are identified magnetic lineations. SR = Shatsky Ridge; HR = Hess Rise; ET = Emperor Trough; CT = Chinook Trough; SFZ = Surveyor Fracture Zone; MFZ = Mendocino Fracture Zone; PFZ = Pioneer Fracture Zone; UFZ = Murray Fracture Zone; OFZ = Molokai Fracture Zone; AFZ = Amlia Fracture Zone; LR = Liliuokalani Ridge; MS = Musicians Seamounts; JP = Japanese Group seamounts; MWC = Marcus Wake chain; MPM = Mid Pacific Mountains; NFZ = Nosappu fracture zone; NR = Necker Ridge; KU = Kruzenstern fracture zone; NS = Non Surveyor feature, HT = Hokkaido Trough. Magnetic lineations (identified in Figure 2) are from compilatioms maintained by Larry Lawver and Lisa Gahagan at the Plates Project, Univerity of Texas at Austin, and my own updates digitized from Nakashini et al. (1989) and Atwater (1989). Mercator projection; scale bar is for approximately the latitude of Hess Rise.
Taken
from Watts and Daly Ann. Rev. Earth
Planet. Sci., 1981
The
sketch below shows the free-air and Bouguer anomaly associated with Hawaii both
as derived from the observations, and also what the gravity observation would
show if Hawaii were in isostatic equilibrium.
It
is the gravity observation that tells us the coarse sub-surface structure of
the shallow Earth.
Pratt and Airy Hypotheses
Gravity
observations cannot tell us what the structures are like within the Earth, only
whether or not there is a density excess or defecit. Two hypotheses exist which
attempt to explain the gravity observations. That of Airy (below left) assumes
that the rigid upper layer has a constant density that is lower than the
substratum beneath. The mountain “floats” with deep roots like an iceberg.
Conversely, Pratt (below right) assumes that the base of the upper layer is
level, and it is the density within the upper layer that changes. Determining
which of these hypotheses operates in the Earth is far from straightforward;
however, in combination with seismology, detailed structures can be observed and
understood.
Moment of Inertia
Circular motion
Just as linear
velocity is distance travelled per unit time, so too angular velocity of a
rotating body is the angle rotated per unit time. The angular velocity, ω,
of a body rotating in a circular of radius r, with linear speed v, is:
ω = v/r
where ω
must be in radians per unit time, normally, radians/s or rads/s.
Centripetal acceleration
Velocity is
a vector and therefore is defined by both magnitude (speed) and direction. A
rotating body is therefore changing its velocity continuously as it is always
changing direction. It therefore has an acceleration. A body rotation on a
circle of radius r, with linear speed v is being continuously accelerated
towards the centre of the circle with a magnitude:
a = r ω2
= v ω = v2/r
where a is
in units of m/s2
Mass of the Earth from an orbiting satellite
(e.g., the Moon)
From
Newton’s Law, a body moving with angular velocity, ω, in circular orbit of
radius R about the Earth will have a centripetal acceleration towards the Earth
of:
F = ma = mR
ω2
The force provided
by the gravitational attraction between the Earth and the satellite is:
F = GMm/R2
Equating the
two gives:
M=R3
ω2/G
Moment of Inertia
The
mechanics of the Earth’s rotation avout its axis introduces a quantity called
the moment
of inertia, which is the rotational mechanical analogue of mass. The
moment of inertia of a point mass, m, rotating at a distance, r, about an axis
is mr2. The moment of inertia of a body rotating about an axis is
the sum of all the point contributions of the moments of inertia of the single
point masses, mi, within the body, each at a distance ri
from the rotation axis:
I = ∑miri2
The value
for the moment of inertia therefore depends on the mass distribution within the
body. For example, a bicycle wheel with all the mass concentrated on the rim
would have a moment of inertia of mr2; if the mass was all in the
axle, the moment of inertia would be zero; if the mass was evenly distributed
across the wheel, I = 0.5mr2.
In general,
the moment of inertia is given by:
I = kmr2
Where k is a
dimensionless constant that is object/material dependent. Examples include:
k = 1 a
ring or thin walled cylinder rotating about its centre
k = 0.4 a
solid sphere rotating about its centre
k = 0.5 a
solid cylinder or disk rotating about its centre
For a sphere
made up of homogeneous layers, the moment of inertia can be determined
additively; for example, an Earth of radius R with a metal core of radius r and
a silicate mantle:

 metal
metal

 IE = IM(R)
– IM(r) + IC(r)
IE = IM(R)
– IM(r) + IC(r)
 =
- +
=
- +
silicate metal
Silicate silicate
See Second Coursework
Exercise
Useful
websites
http://www.ngdc.noaa.gov/mgg/announcements/announce_predict.html
http://www.jpl.nasa.gov/earth/features/watkins.html
http://www.csr.utexas.edu/grace/gallery/animations/ggm01/index.html